
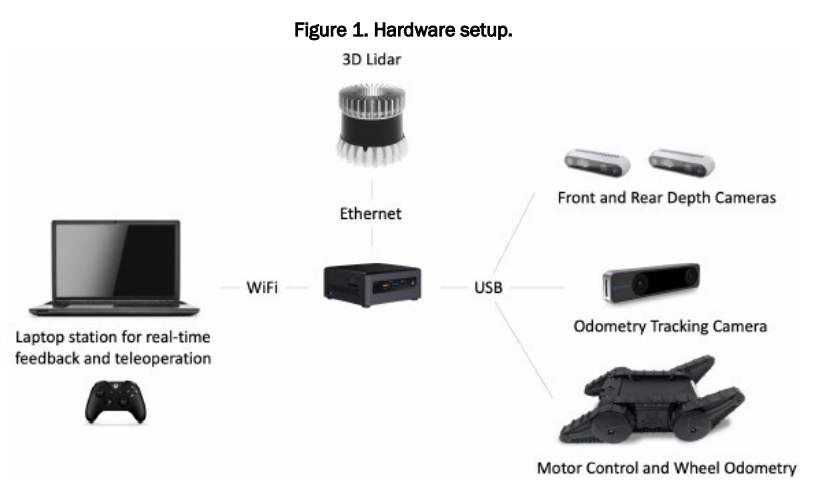
利用无人地面飞行器(UGV)进行自主导航和未知环境探索极具挑战性。本报告研究了一种利用小尺寸、低重量、低功耗和低成本有效载荷的测绘和探索解决方案。本文介绍的平台利用同步定位和绘图功能,通过寻找可导航路线来有效探索未知区域。该解决方案利用多种传感器有效载荷,包括轮子编码器、三维激光雷达、红-绿-蓝相机和深度相机。这项工作的主要目标是利用 UGV 的路径规划和导航功能进行测绘和探索,从而生成精确的 3D 地图。所提供的解决方案还利用了机器人操作系统。
成为VIP会员查看完整内容
相关内容

Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日
相关VIP内容
相关资讯
相关论文
Arxiv
42+阅读 · 2023年4月19日
Arxiv
224+阅读 · 2023年4月7日
Arxiv
86+阅读 · 2023年4月4日
Arxiv
152+阅读 · 2023年3月29日