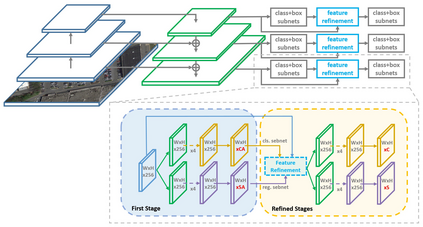
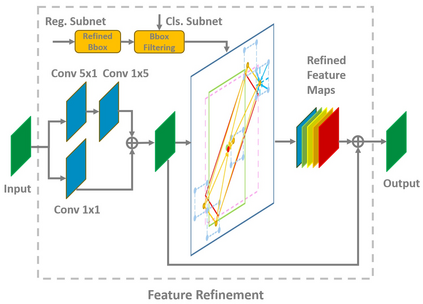
Rotation detection is a challenging task due to the difficulties of locating the multi-angle objects and separating them accurately and quickly from the background. Though considerable progress has been made, for practical settings, there still exist challenges for rotating objects with large aspect ratio, dense distribution and category extremely imbalance. In this paper, we propose an end-to-end refined single-stage rotation detector for fast and accurate positioning objects. Considering the shortcoming of feature misalignment in existing refined single-stage detector, we design a feature refinement module to improve detection performance by getting more accurate features. The key idea of feature refinement module is to re-encode the position information of the current refined bounding box to the corresponding feature points through feature interpolation to realize feature reconstruction and alignment. Extensive experiments on two remote sensing public datasets DOTA, HRSC2016 as well as scene text data ICDAR2015 show the state-of-the-art accuracy and speed of our detector. Code is available at https://github.com/SJTU-Det/R3Det_Tensorflow.
翻译:由于难以定位多角天体并将其准确和迅速地与背景区分,轮调探测是一项艰巨的任务。虽然在实际环境方面已经取得了相当大的进展,但在旋转具有大宽度比率、密集分布和类别极不平衡的物体方面仍然存在挑战。在本文件中,我们提议为快速和准确定位天体提供一个端对端精细的单阶段旋转探测器。考虑到现有精细的单级探测器特征不匹配的缺点,我们设计了一个功能改进模块,通过获取更准确的特性改进模块来改进探测性能。功能改进模块的关键理念是通过特征内插将当前精细的捆绑框的位置信息重新编码到相应的特征点,以实现特征的重建和一致。关于两个遥感公共数据集DOTA、HRSC2016以及现场文本数据的大规模实验,ICDAR2015显示我们探测器的状态-艺术准确性和速度。代码可在https://github.com/JTU-D/R3Det_Tensorfrent查阅。