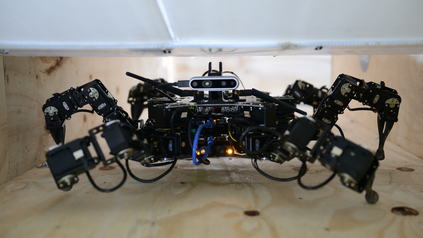
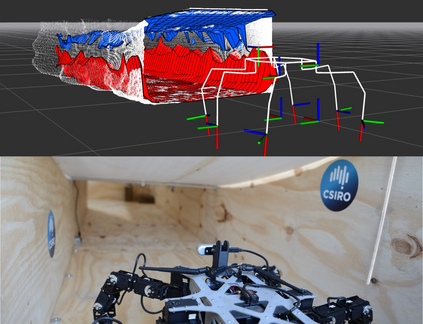
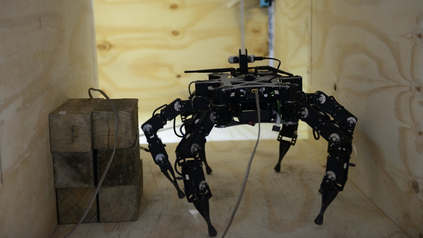
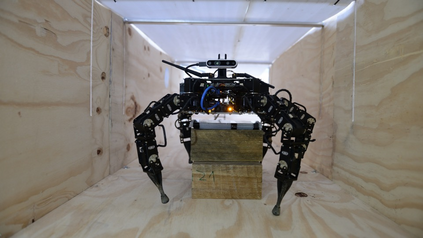
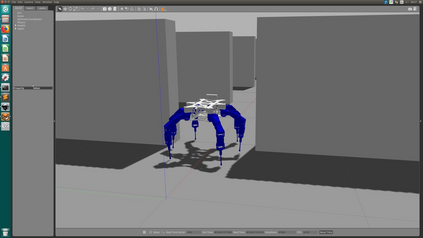
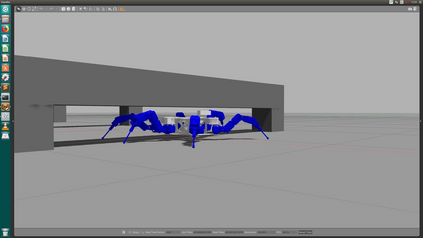
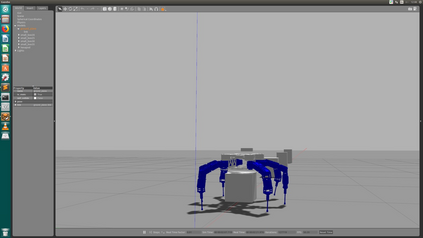
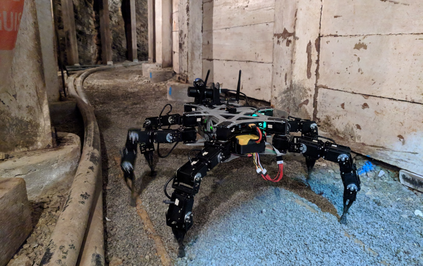
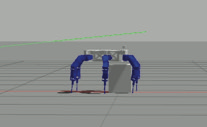
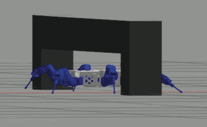
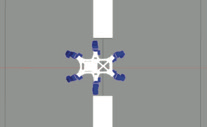
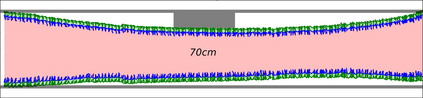
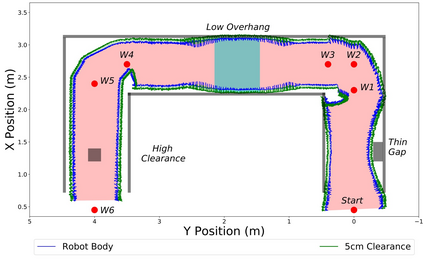
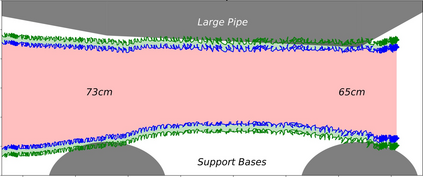
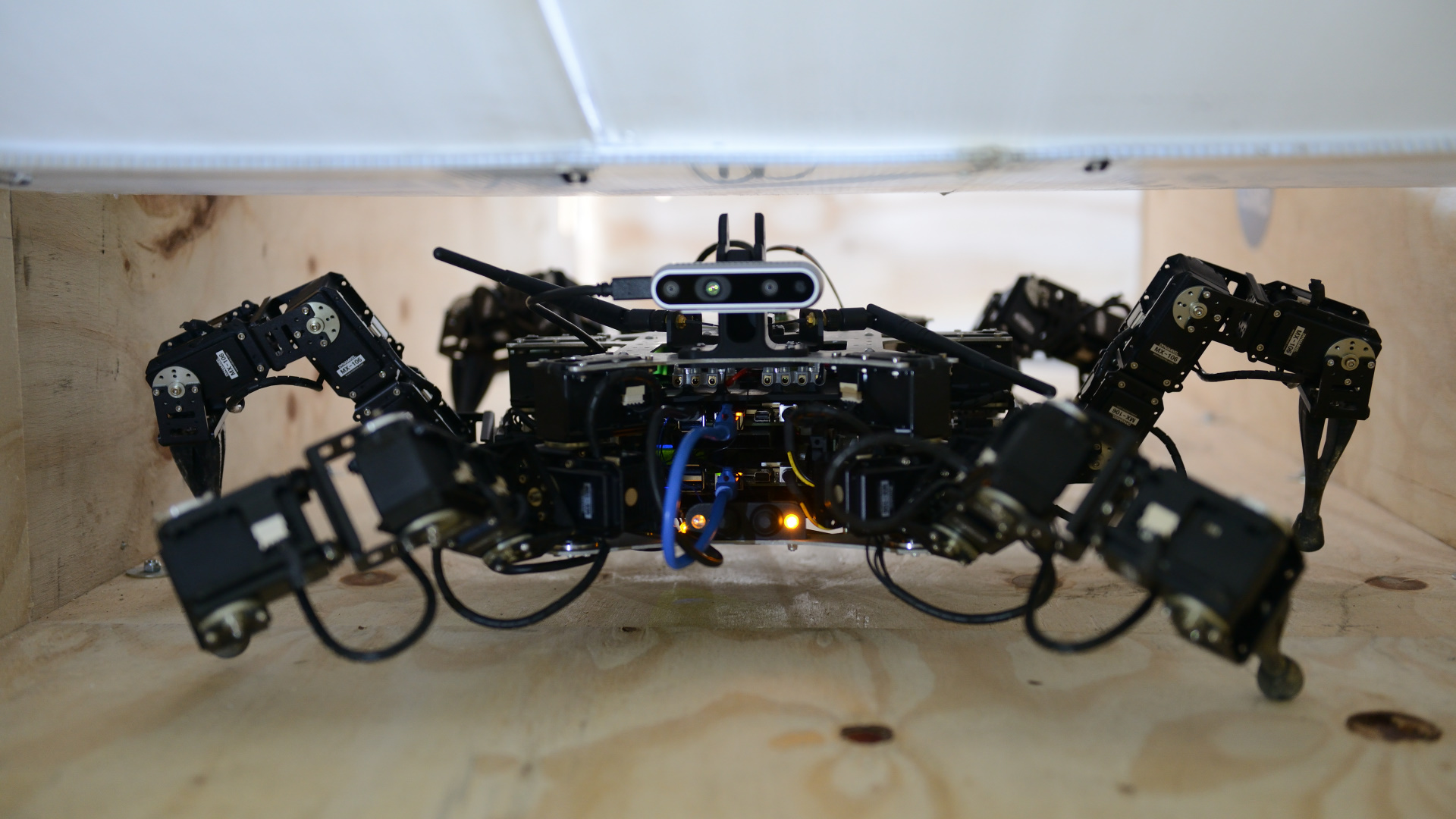
Legged robots have the ability to adapt their walking posture to navigate confined spaces due to their high degrees of freedom. However, this has not been exploited in most common multilegged platforms. This paper presents a deformable bounding box abstraction of the robot model, with accompanying mapping and planning strategies, that enable a legged robot to autonomously change its body shape to navigate confined spaces. The mapping is achieved using robot-centric multi-elevation maps generated with distance sensors carried by the robot. The path planning is based on the trajectory optimisation algorithm CHOMP which creates smooth trajectories while avoiding obstacles. The proposed method has been tested in simulation and implemented on the hexapod robot Weaver, which is 33cm tall and 82cm wide when walking normally. We demonstrate navigating under 25cm overhanging obstacles, through 70cm wide gaps and over 22cm high obstacles in both artificial testing spaces and realistic environments, including a subterranean mining tunnel.
翻译:脚步机器人有能力调整行走姿势以导航封闭的空间, 因为他们的自由度较高。 但是, 这一点在大多数常见的多脚平台上都没有被利用。 本文展示了机器人模型的变形捆绑盒式抽象, 并附有绘图和规划策略, 使脚步机器人能够自动改变身体形状以导航封闭的空间。 绘制地图时使用了机器人携带的远程传感器生成的以机器人为中心的多升地图。 路径规划基于轨迹优化算法 CHOMP, 该算法创造平滑的轨迹, 并避免障碍。 提议的方法在模拟中测试, 并在六肢机器人 Weaver 上实施, 通常行走时是33厘米高, 82厘米宽。 我们展示了在25厘米以下的悬浮屏障下行驶, 超过70厘米的宽空隙, 超过22厘米的高屏障, 在人工测试空间和现实环境中, 包括地下采矿隧道 。