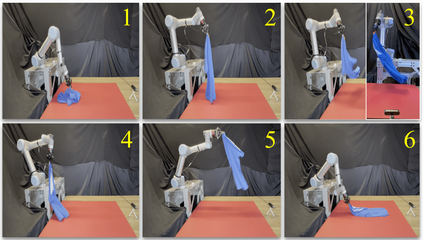
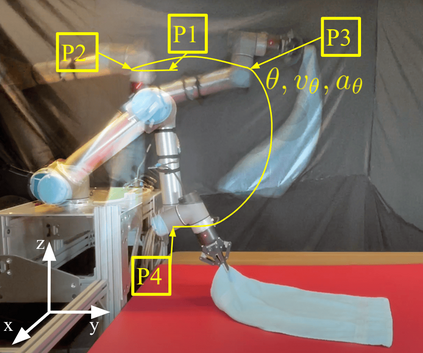
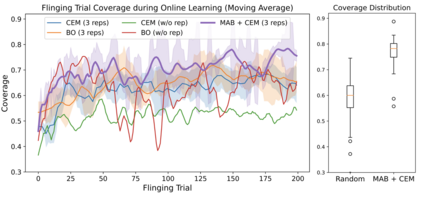
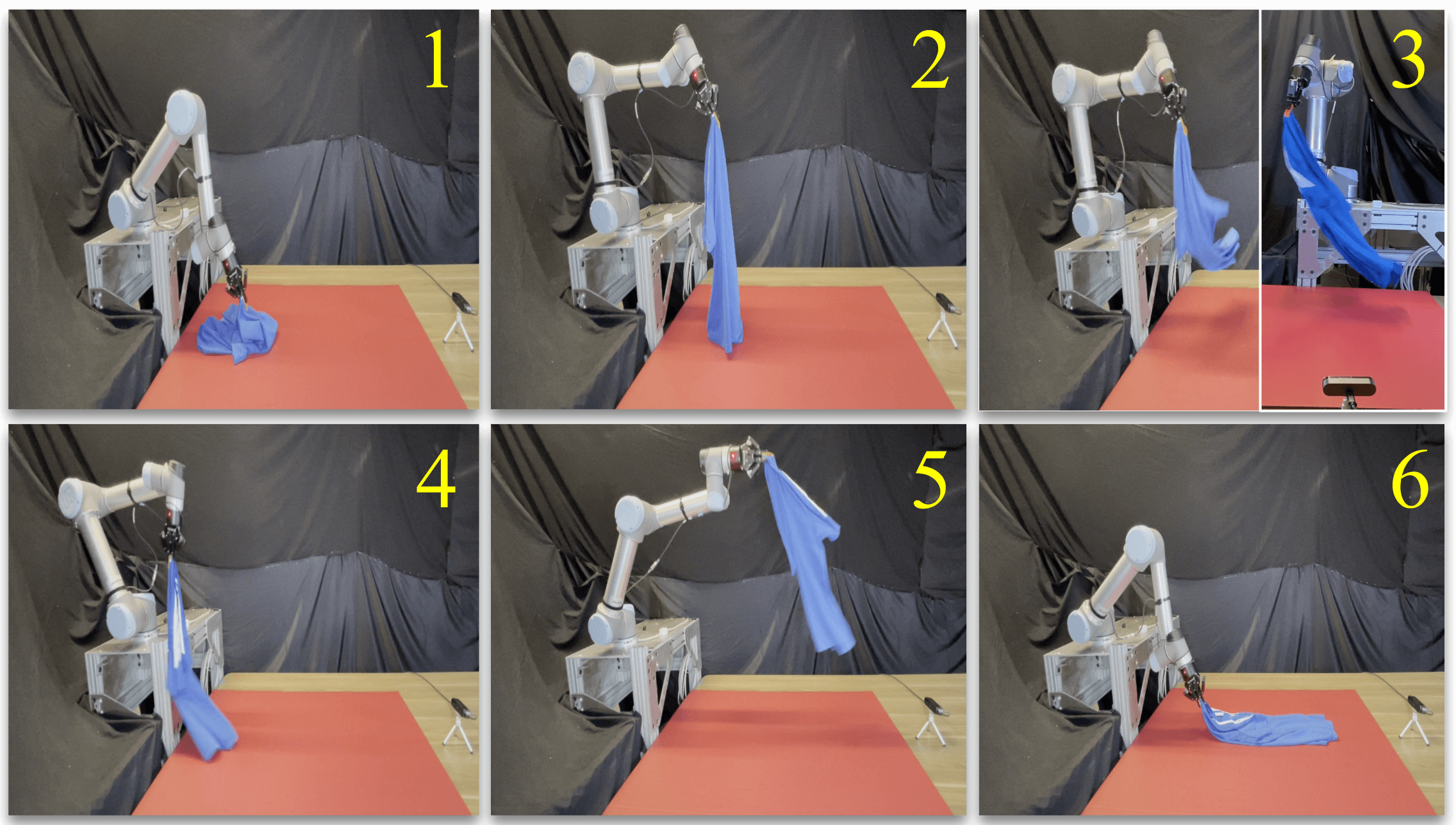
Recent work has shown that 2-arm "fling" motions can be effective for garment smoothing. We consider single-arm fling motions. Unlike 2-arm fling motions, which require little robot trajectory parameter tuning, single-arm fling motions are sensitive to trajectory parameters. We consider a single 6-DOF robot arm that learns fling trajectories to achieve high garment coverage. Given a garment grasp point, the robot explores different parameterized fling trajectories in physical experiments. To improve learning efficiency, we propose a coarse-to-fine learning method that first uses a multi-armed bandit (MAB) framework to efficiently find a candidate fling action, which it then refines via a continuous optimization method. Further, we propose novel training and execution-time stopping criteria based on fling outcome uncertainty. Compared to baselines, we show that the proposed method significantly accelerates learning. Moreover, with prior experience on similar garments collected through self-supervision, the MAB learning time for a new garment is reduced by up to 87%. We evaluate on 6 garment types: towels, T-shirts, long-sleeve shirts, dresses, sweat pants, and jeans. Results suggest that using prior experience, a robot requires under 30 minutes to learn a fling action for a novel garment that achieves 60-94% coverage.
翻译:最近的工作表明, 2 条手臂“ 拖动” 动作可以有效发光。 我们考虑单臂拖动。 我们考虑的是单臂拖动。 与 2 条手臂拖动动议不同, 需要小机器人轨道参数调整, 单臂拖动对轨道参数很敏感。 我们考虑的是单一的 6 条DOF 机器人臂, 学习滑行轨轨迹, 以获得高服装覆盖。 根据一个衣着抓取点, 机器人可以探索物理实验中不同参数化的滑动轨迹。 为了提高学习效率, 我们建议一种粗丝到平丝的学习方法, 首先使用多臂土匪(MAB) 框架, 以高效地寻找一个候选人的挥舞动作, 然后通过连续的优化方法加以完善。 此外, 我们建议采用一个新的培训和执行时间标准, 与基线相比, 我们提议的方法可以大大加快学习。 此外, 由于以前通过自超视镜收集的类似服装的经验, 新的服装学习时间将缩短到 87% 。 我们评估了 6 制服装类型: 毛巾、 T恤衫、 长袖 、 30 的服装需要 运动 的服装到新衣服, 的服装需要 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 制 新的 新的 新的 新的 制 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 制 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 制 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 制 制 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 制 新的 新的 新的 新的 新的 新的 新的 新的 新的 新的 制 新的 新的 制 制 新的 新的 新的 新的 新的 制 新的 新的 新的 新的 制 制 制 制 制 制 制