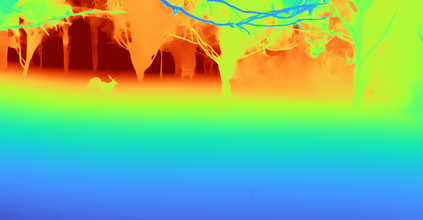
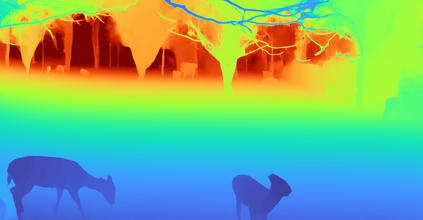
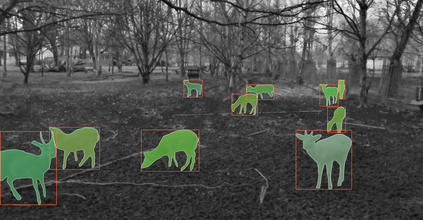
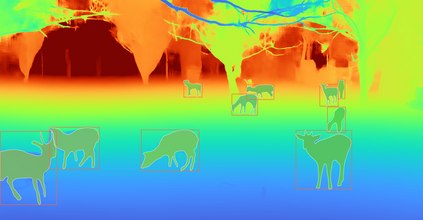
The development and application of modern technology is an essential basis for the efficient monitoring of species in natural habitats and landscapes to trace the development of ecosystems, species communities, and populations, and to analyze reasons of changes. For estimating animal abundance using methods such as camera trap distance sampling, spatial information of natural habitats in terms of 3D (three-dimensional) measurements is crucial. Additionally, 3D information improves the accuracy of animal detection using camera trapping. This study presents a novel approach to 3D camera trapping featuring highly optimized hardware and software. This approach employs stereo vision to infer 3D information of natural habitats and is designated as StereO CameRA Trap for monitoring of biodivErSity (SOCRATES). A comprehensive evaluation of SOCRATES shows not only a $3.23\%$ improvement in animal detection (bounding box $\text{mAP}_{75}$) but also its superior applicability for estimating animal abundance using camera trap distance sampling. The software and documentation of SOCRATES is provided at https://github.com/timmh/socrates
翻译:现代技术的开发和应用是有效监测自然生境和景观物种以追踪生态系统、物种群和种群的发展以及分析变化原因的必要基础。为了利用摄像器捕获距离取样等方法估计动物丰度,至关重要的是利用3D(三维)测量法对自然生境的空间信息进行3D(三维)测量。此外,3D信息提高了使用摄像器捕捉动物探测的准确性。本研究提出了以高度优化的硬件和软件为特点的3D摄像性捕捉的新方法。这一方法采用立体视觉来推断自然生境的3D信息,并被指定为监测生物divERSity的StereO Camera Trap(SOCRATES)。对SOCRATES的全面评估显示,动物探测方面不仅改进了3.23美元(绑框$\text{mAP ⁇ 75美元),而且利用摄像器远程取样评估动物丰度的优势性。SOCRETES的软件和文件见https://github.com/timm/sotratates。