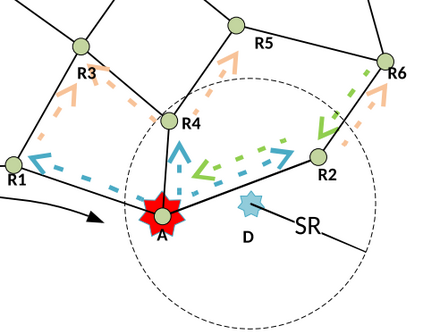
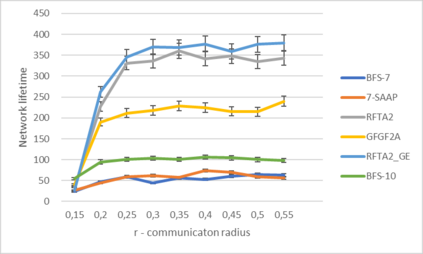
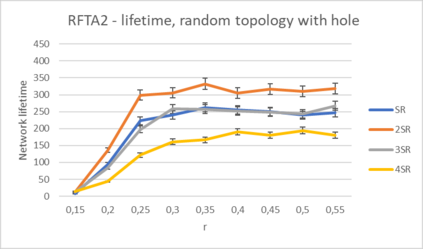
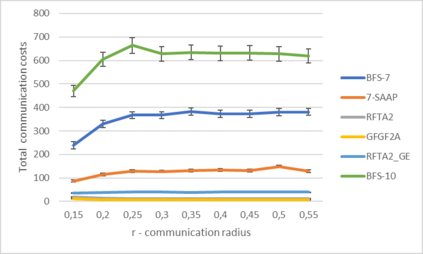
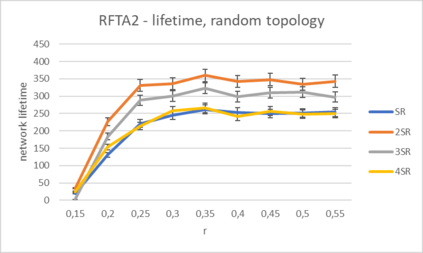
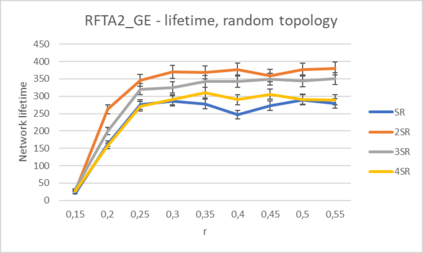
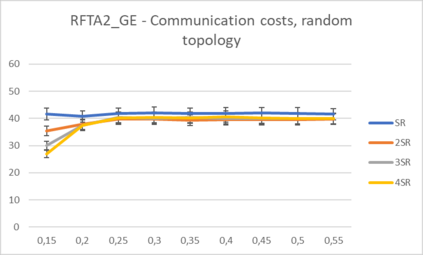
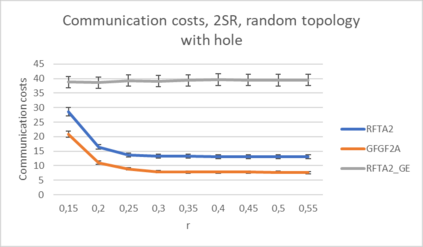
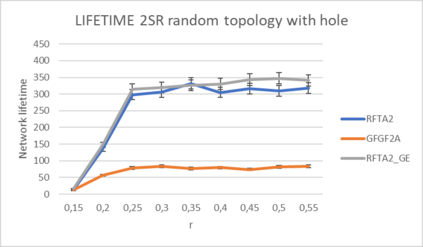
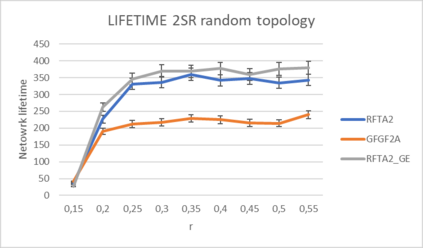
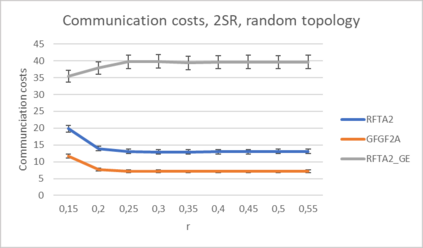
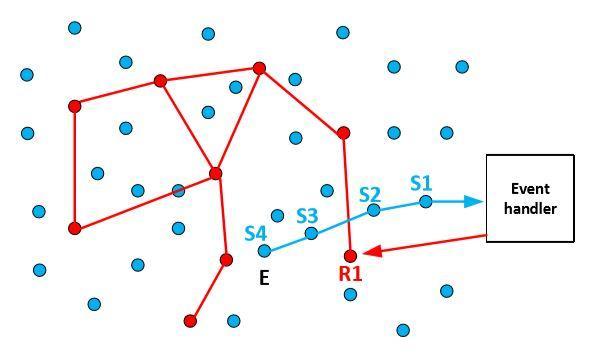
Four new algorithms (RFTA1, RFTA2, GFGF2A, and RFTA2GE) handling the event in wireless sensor and robot networks based on the Greedy-Face-Greedy (GFG) routing extended with auctions are proposed in this paper. In this paper we assume that all robots are mobile and after the event is found (reported by sensors), the goal is to allocate the task to the most suitable robot to act upon the event, using either distance or the robots' remaining energy as metrics. The proposed algorithms consist of two phases. The first phase of algorithms is based on face routing and we introduced the parameter called search radius (SR) at the end of this first phase. Routing is considered successful if the found robot is inside SR. After that, the second phase, based on auctions, is initiated by the robot found in SR trying to find a more suitable one. In the simulations, network lifetime and communication costs are measured and used for comparison. We compare our algorithms with two similar algorithms from the literature (k-SAAP and BFS) used for the task assignment. RFTA2 and RFTA2GE feature up to 7 times longer network lifetime with significant communication overhead reduction compared to k-SAAP and BFS. Among our algorithms, RFTA2GE features the best robot energy utilization.
翻译:本文建议采用四个新的算法(RFTA1、RFTA2、GFG2A和RFTA2GE)处理无线传感器和机器人网络中的活动,这些算法以贪婪-脸面-Greedy(GFG)为例,并随拍卖延长了路线。本文建议采用四个新的算法(RFTA1、RFTA2、GFG2A和RFTA2GE)处理无线传感器和机器人网络中的活动。我们假定所有机器人都是移动的,并在发现活动之后(由传感器报告),目标是将任务分配给最合适的机器人,利用距离或机器人的剩余能量作为衡量。提议的算法包括两个阶段。在第一阶段,算法的第一阶段以面线为基础,我们在第一阶段结束时采用了称为搜索半径的参数(SR),如果发现机器人在SR内,则视为成功。此后,第二阶段由SRFA的机器人根据拍卖,试图找到更合适的一个过程。在模拟、网络寿命和通信成本中进行衡量并用于比较。我们将我们的算法与文献中的两种类似的算法(k-SAAP和BFSFSA)比RFAS-FAS-FA)比长期重要任务利用。