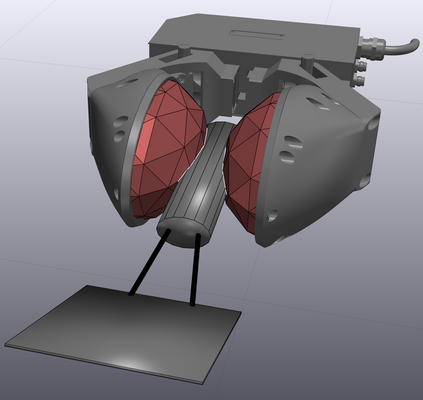
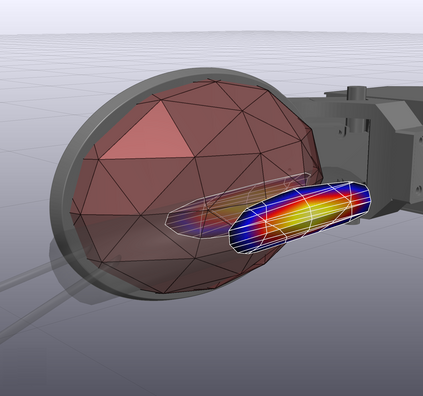
Rich interaction with the world requires extensive contact between robots and the objects in their environment. Most such contacts involve significant compliance between the contacting surfaces due to rubber pads or inflated grippers, soft objects to be manipulated, and soft surfaces for safe human-robot interaction. Accurate simulation of these contacts is critical for meaningful sim-to-real transfer. Compliant contact interactions generate contact surfaces of considerable extent, over which contact forces are distributed with varying pressure. Finite element methods can capture these effects but are too slow for most robotics applications. Consequently, in order to enable real-time simulation rates, most current simulation tools model contact as occurring between rigid bodies at a point or set of points using ad hoc methods to incorporate localized compliance. However, point contact is non-smooth, hard to extend to arbitrary geometry, and often introduces non-physical artifacts. Moreover, point contact misses important area-dependent phenomena critical for robust manipulation, such as net contact moment and slip control. Pressure Field Contact (PFC) was recently introduced as a method for detailed modeling of contact interface regions at rates much faster than elasticity-theory models, while at the same time predicting essential trends and capturing rich contact behavior. PFC was designed to work with coarsely-meshed objects while preserving continuity to permit use with error-controlled integrators. Here we introduce a discrete approximation of PFC suitable for use with velocity-level time steppers that enables execution at real-time rates. We evaluate the accuracy and performance gains of our approach and demonstrate its effectiveness in simulation of relevant manipulation tasks. The method is available in open source as part of Drake's Hydroelastic Contact model.
翻译:与世界的丰富互动要求机器人及其环境中的物体之间广泛接触。 多数此类接触涉及由于橡胶垫或膨胀的牵引器、需要操纵的软物体和用于安全人体- 机器人互动的软表面之间的接触表面之间的大量合规性。 精确模拟这些接触对于有意义的模拟到真实的转移至关重要。 相近互动产生相当程度的接触表面, 接触力量在压力上分布不一。 精度元素方法可以捕捉这些效应, 但对于大多数机器人应用来说过于缓慢。 因此,为了能够实时模拟率, 多数目前的模拟工具模型接触是在一个或一组点的僵硬机体之间, 使用局部的精确性能进行, 使用局部性能模拟, 难以扩展到任意的地理测量, 并经常引入非物理的工艺。 点接触点忽略了对于稳健操作至关重要的重要地区性现象, 例如, 净接触时刻和滑动控制。 压力实地接触(PFIC)最近被引入了一种方法, 用于详细模拟接触界面的模拟区域, 速度比实际步骤速度快得多, 的精确操作速度比固定的精确性操作速度, 而我们使用一个固定的精确的精确的运行模型, 。 我们在正确的操作中, 使用一个固定的运行中, 使用一个固定的运行中,, 使用一个过程的精确的精确的计算工具, 。 我们使用一个固定的精确的精确的计算,,,,,,,, 使用一个过程的精确的计算方法, 使用一个节能, 使用一个方法,,, 使用一个节率 。