
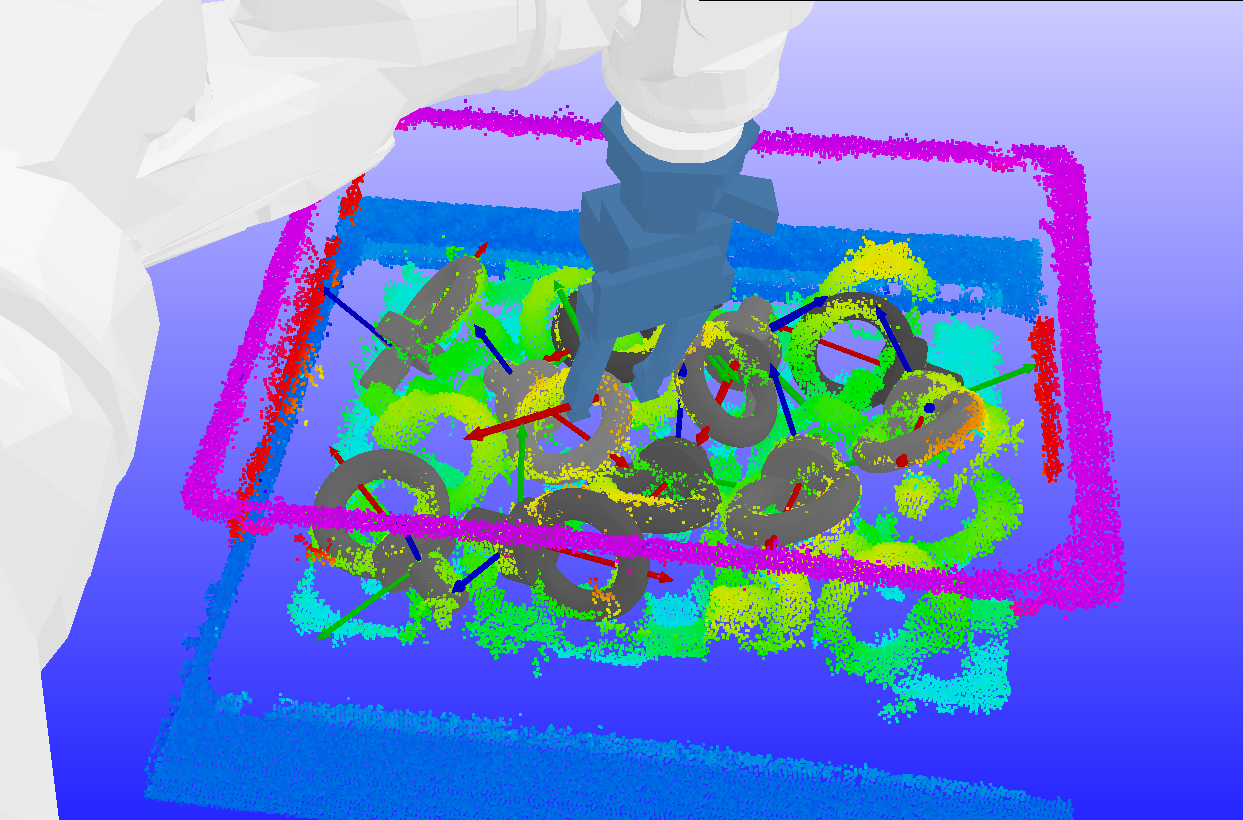
Single shot approaches have demonstrated tremendous success on various computer vision tasks. Finding good parameterizations for 6D object pose estimation remains an open challenge. In this work, we propose different novel parameterizations for the output of the neural network for single shot 6D object pose estimation. Our learning-based approach achieves state-of-the-art performance on two public benchmark datasets. Furthermore, we demonstrate that the pose estimates can be used for real-world robotic grasping tasks without additional ICP refinement.
翻译:单镜头方法在各种计算机愿景任务中表现出巨大的成功。 为 6D 对象寻找良好的参数仍然是一项尚未解决的挑战。 在这项工作中,我们提出对单镜头 6D 对象神经网络输出的不同新颖参数,以 6D 对象构成估计。我们以学习为基础的方法在两个公共基准数据集上取得了最先进的业绩。此外,我们证明,如果不对比较方案作进一步的改进,这些构成的估计数可以用于实际世界的机器人掌握任务。




相关内容

专知会员服务
21+阅读 · 2020年6月13日
专知会员服务
38+阅读 · 2020年3月23日
专知会员服务
26+阅读 · 2019年11月23日
Arxiv
6+阅读 · 2018年1月24日



相关VIP内容
专知会员服务
21+阅读 · 2020年6月13日
专知会员服务
38+阅读 · 2020年3月23日
专知会员服务
26+阅读 · 2019年11月23日
相关资讯
相关论文
Arxiv
6+阅读 · 2018年1月24日