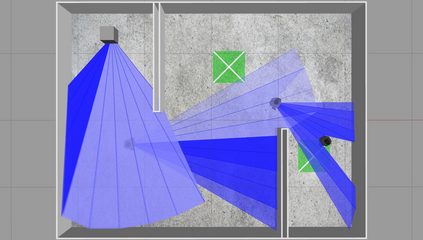
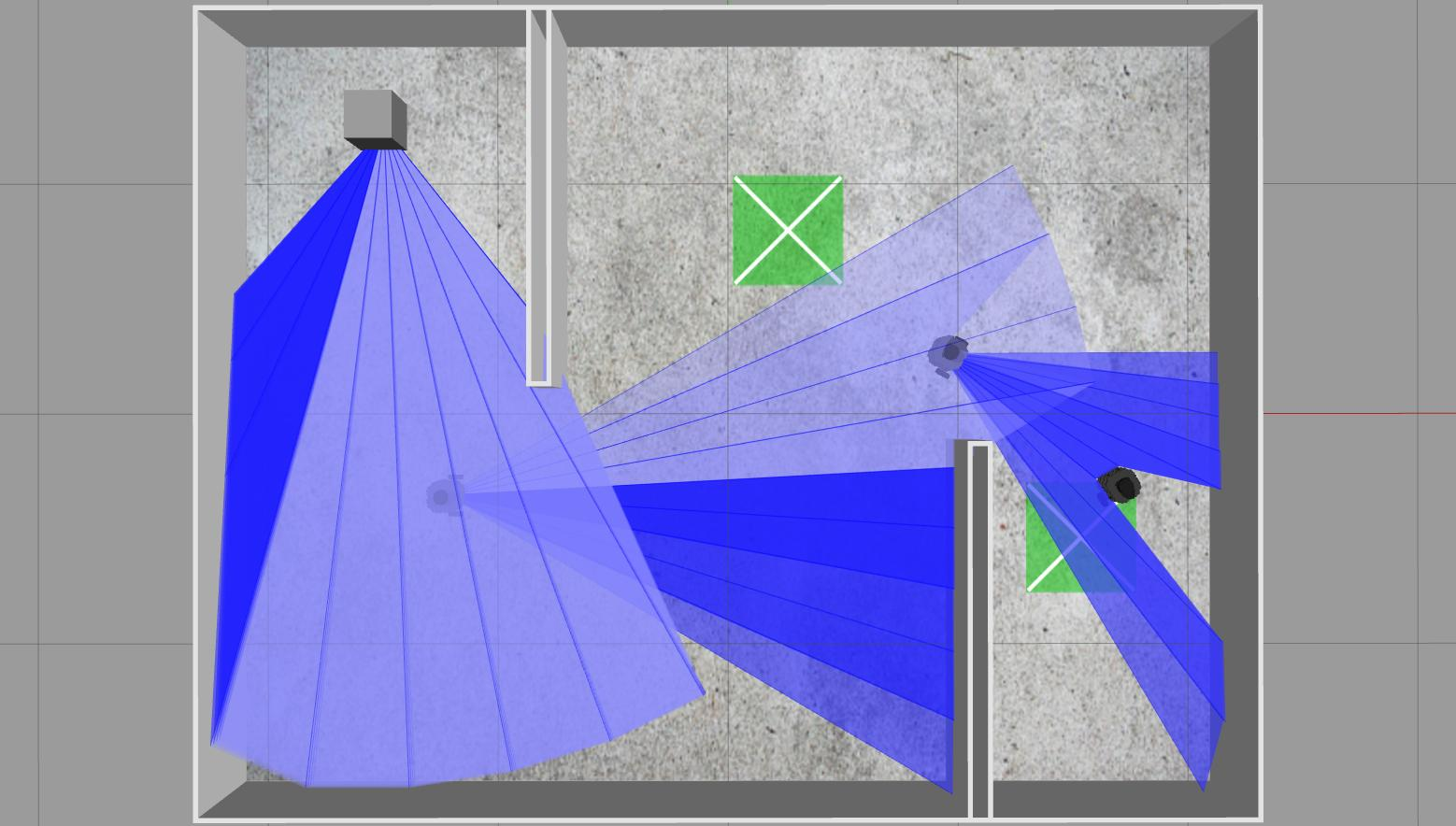
This work addresses the problem of motion planning for a group of nonholonomic robots under Visible Light Communication (VLC) connectivity requirements. In particular, we consider an inspection task performed by a Robot Chain Control System (RCCS), where a leader must visit relevant regions of an environment while the remaining robots operate as relays, maintaining the connectivity between the leader and a base station. We leverage Mixed-Integer Linear Programming (MILP) to design a trajectory planner that can coordinate the RCCS, minimizing time and control effort while also handling the issues of directed Line-Of-Sight (LOS), connectivity over directed networks, and the nonlinearity of the robots' dynamics. The efficacy of the proposal is demonstrated with realistic simulations in the Gazebo environment using the Turtlebot3 robot platform.
翻译:暂无翻译