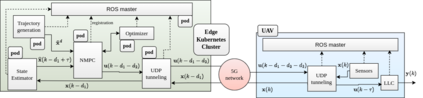
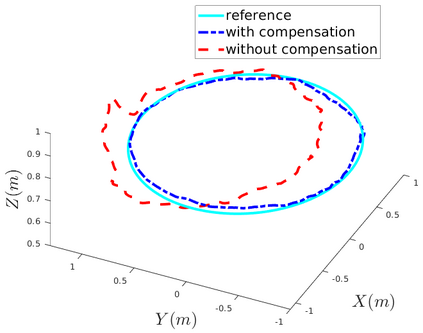
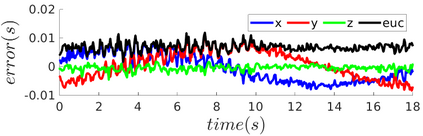
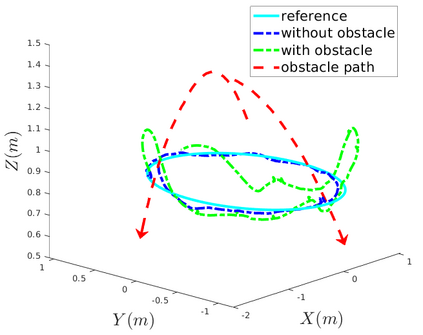
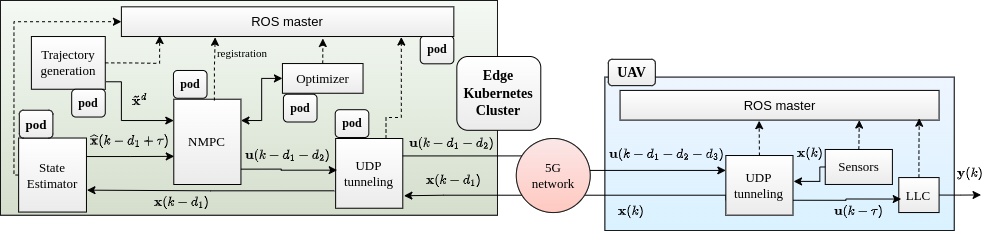
With the advent of technologies such as Edge computing, the horizons of remote computational applications have broadened multidimensionally. Autonomous Unmanned Aerial Vehicle (UAV) mission is a vital application to utilize remote computation to catalyze its performance. However, offloading computational complexity to a remote system increases the latency in the system. Though technologies such as 5G networking minimize communication latency, the effects of latency on the control of UAVs are inevitable and may destabilize the system. Hence, it is essential to consider the delays in the system and compensate for them in the control design. Therefore, we propose a novel Edge-based predictive control architecture enabled by 5G networking, PACED-5G (Predictive Autonomous Control using Edge for Drones over 5G). In the proposed control architecture, we have designed a state estimator for estimating the current states based on the available knowledge of the time-varying delays, devised a Model Predictive controller (MPC) for the UAV to track the reference trajectory while avoiding obstacles, and provided an interface to offload the high-level tasks over Edge systems. The proposed architecture is validated in two experimental test cases using a quadrotor UAV.
翻译:随着电磁计算等技术的出现,远程计算应用的地平线已经从多层面角度扩大了。自动无人驾驶航空飞行器(UAV)飞行任务是利用远程计算来催化其性能的重要应用。然而,将计算复杂性卸载到远程系统会增加该系统的潜伏。虽然5G网络网络等技术最大限度地减少通信延迟,但悬浮对无人驾驶飞行器控制的影响是不可避免的,并可能破坏系统的稳定。因此,必须考虑系统的延误,并在控制设计中补偿这些延误。因此,我们提议建立一个由5G网络、PACED-5G(使用Drones超过5G的电磁带预先自动控制)启用的基于Edge的新型预测控制结构。在拟议的控制结构中,我们设计了一个国家估计器,根据对时间变化延迟的现有知识来估计当前状态,设计了一个用于UAV跟踪参考轨迹的模型预测控制器(MPC),同时避免障碍,并提供界面,用于将高层任务卸载在UDAV系统上的两个测试案例。