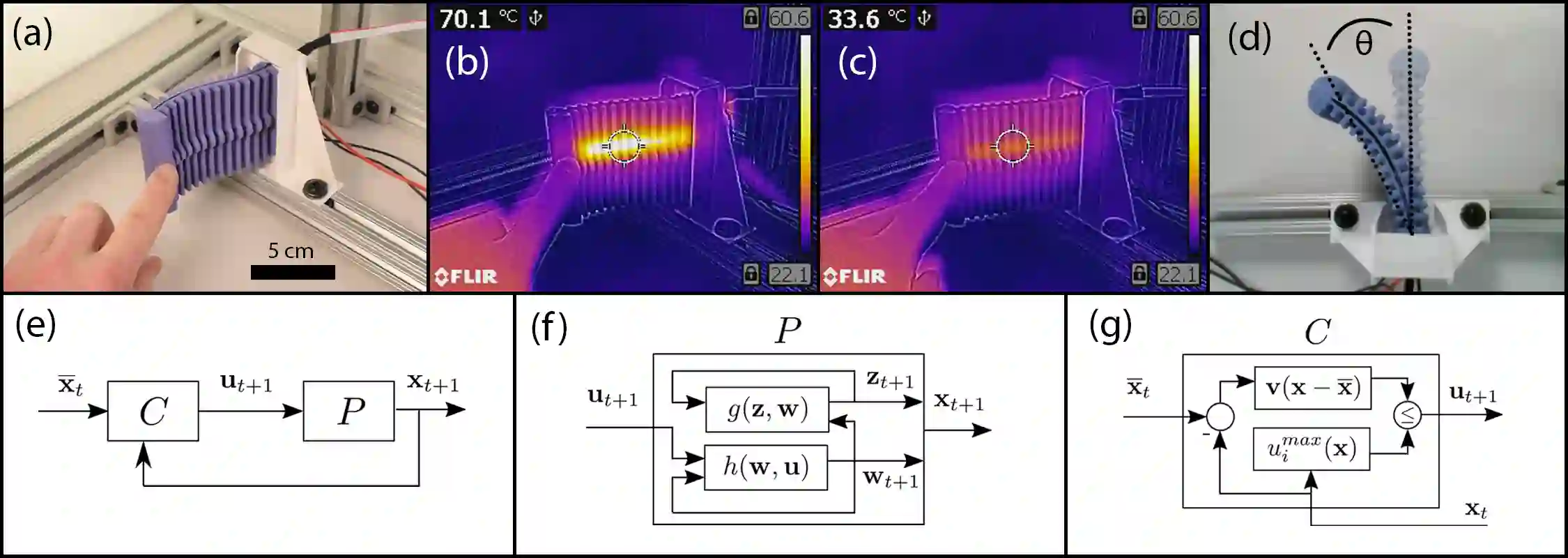
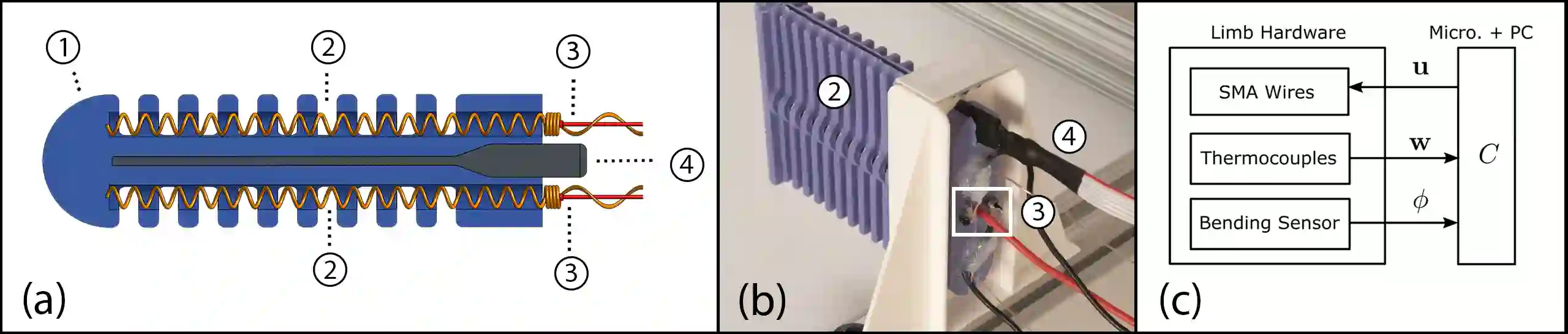
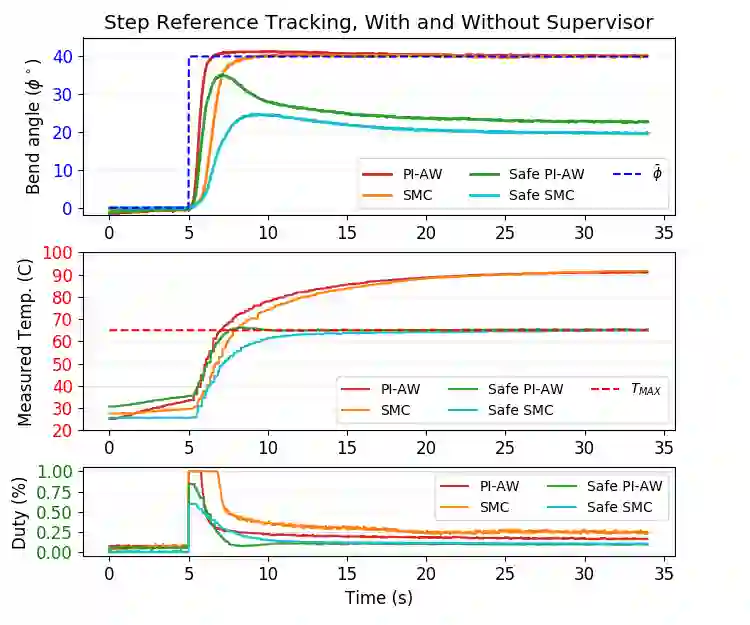
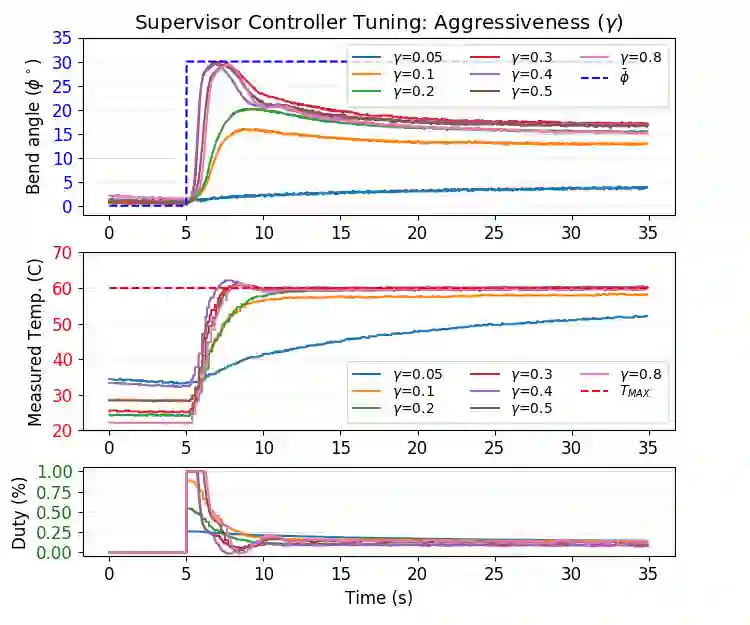
Although soft robots show safer interactions with their environment than traditional robots, soft mechanisms and actuators still have significant potential for damage or degradation particularly during unmodeled contact. This article introduces a feedback strategy for safe soft actuator operation during control of a soft robot. To do so, a supervisory controller monitors actuator state and dynamically saturates control inputs to avoid conditions that could lead to physical damage. We prove that, under certain conditions, the supervisory controller is stable and verifiably safe. We then demonstrate completely onboard operation of the supervisory controller using a soft thermally-actuated robot limb with embedded shape memory alloy (SMA) actuators and sensing. Tests performed with the supervisor verify its theoretical properties and show stabilization of the robot limb's pose in free space. Finally, experiments show that our approach prevents overheating during contact (including environmental constraints and human contact) or when infeasible motions are commanded. This supervisory controller, and its ability to be executed with completely onboard sensing, has the potential to make soft robot actuators reliable enough for practical use.
翻译:虽然软机器人比传统机器人显示更安全地与环境互动,但软机械和活化器仍然有很大的破坏或退化潜力,特别是在非改造接触期间。 本条引入了软机器人控制期间安全软活化器操作的反馈战略。 要做到这一点, 监管控制器监测导动器状态和动态饱和控制输入, 以避免可能导致物理损害的条件。 我们证明, 在某些条件下, 监管控制器是稳定和可以核查的安全的。 然后, 我们用一个软热活化的机械控制器, 使用嵌入式内存合机( SMA) 的操作器和感知器, 在船上展示完全的操作功能。 与监管器一起进行的测试可以验证其理论特性, 并显示机器人肢体在自由空间的稳定性。 最后, 实验表明, 我们的方法可以防止接触时过热( 包括环境限制和人类接触), 或当无法操作的动作被控制器被控制器控制时, 以及它完全在机体上被感测到的能力, 我们有可能使软机器人操作器的操作器变得足够可靠, 供实际使用。