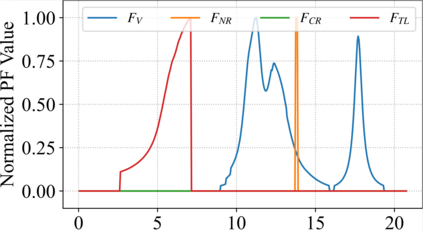
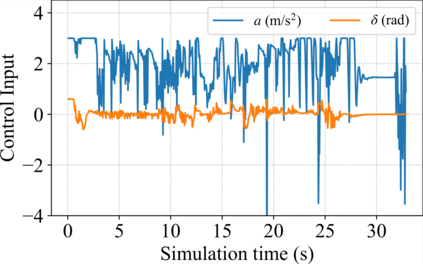
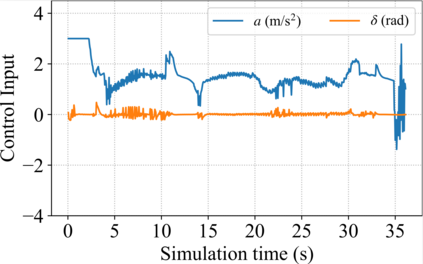
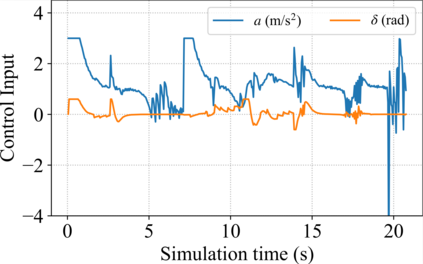
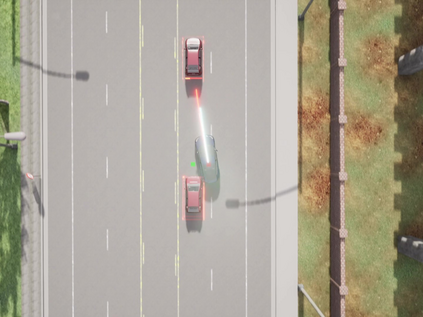
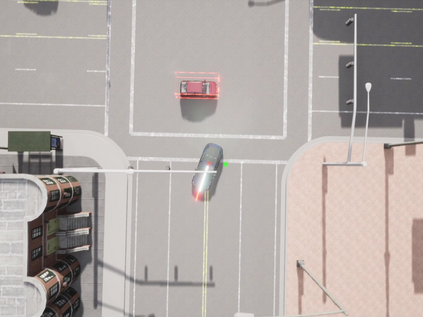
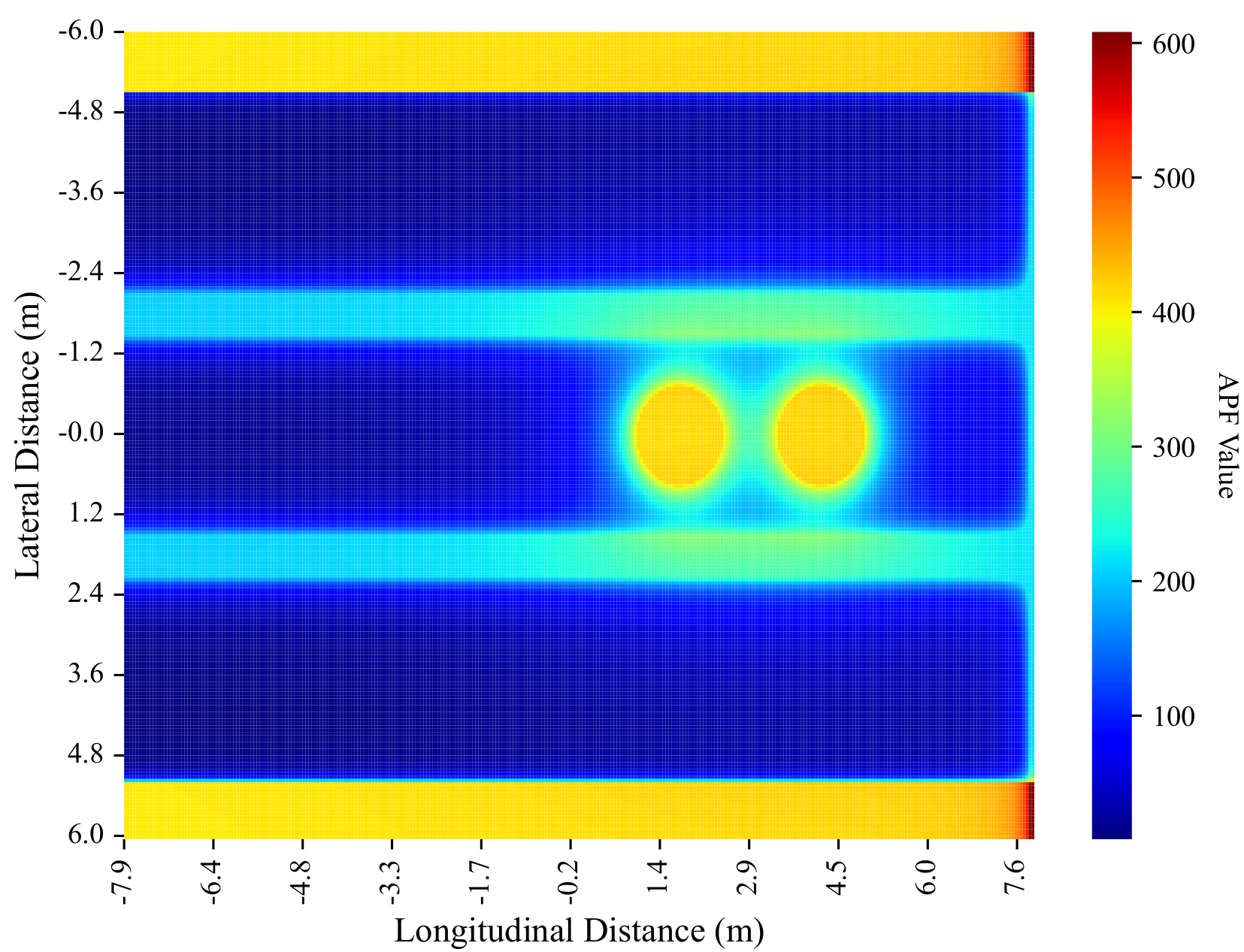
In this article, we propose an optimization-based integrated behavior planning and motion control scheme, which is an interpretable and adaptable urban autonomous driving solution that complies with complex traffic rules while ensuring driving safety. Inherently, to ensure compliance with traffic rules, an innovative design of potential functions (PFs) is presented to characterize various traffic rules related to traffic lights, traversable and non-traversable traffic line markings, etc. These PFs are further incorporated as part of the model predictive control (MPC) formulation. In this sense, high-level behavior planning is attained implicitly along with motion control as an integrated architecture, facilitating flexible maneuvers with safety guarantees. Due to the well-designed objective function of the MPC scheme, our integrated behavior planning and motion control scheme is competent for various urban driving scenarios and able to generate versatile behaviors, such as overtaking with adaptive cruise control, turning in the intersection, and merging in and out of the roundabout. As demonstrated from a series of simulations with challenging scenarios in CARLA, it is noteworthy that the proposed framework admits real-time performance and high generalizability.
翻译:暂无翻译