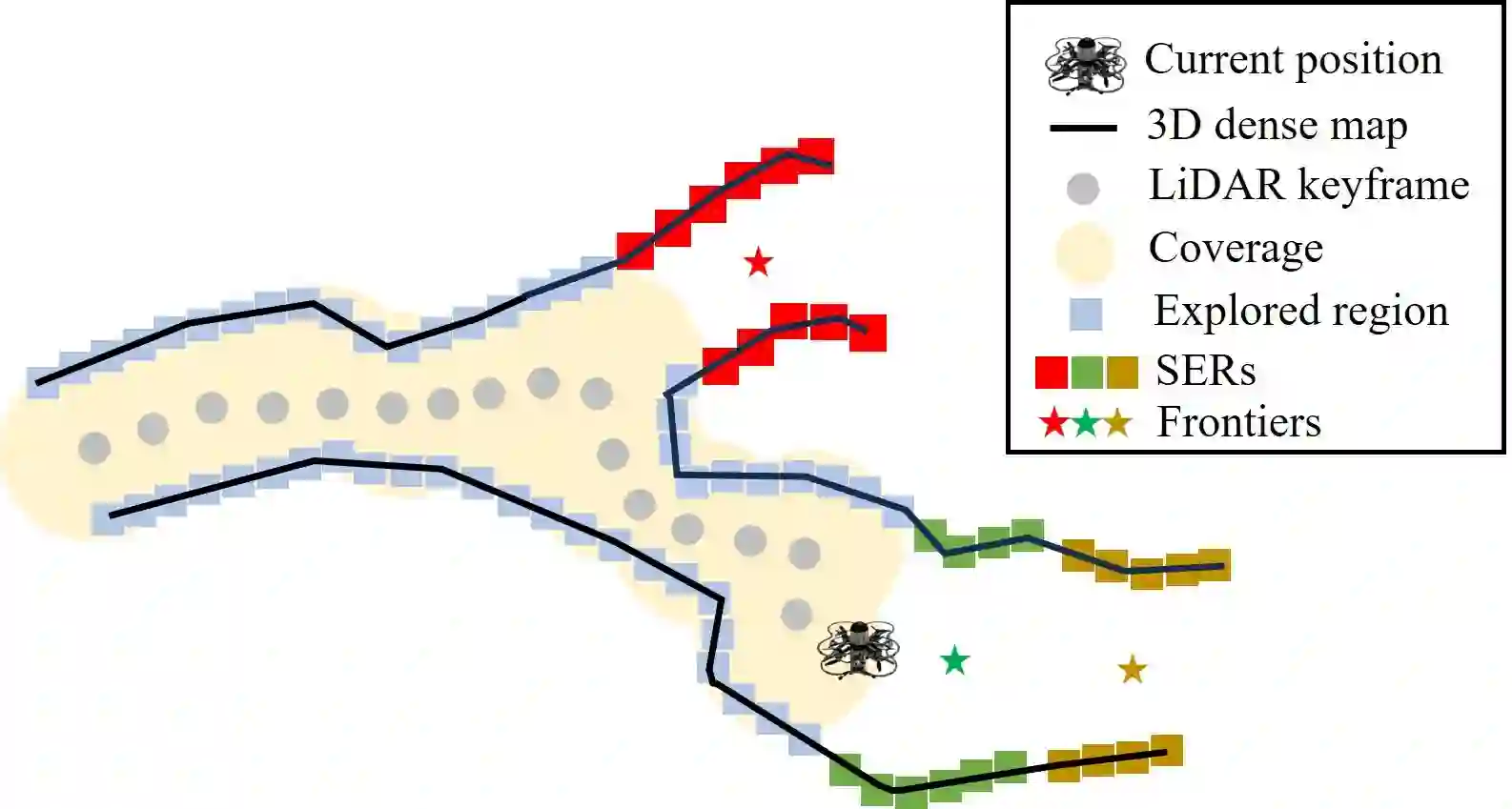
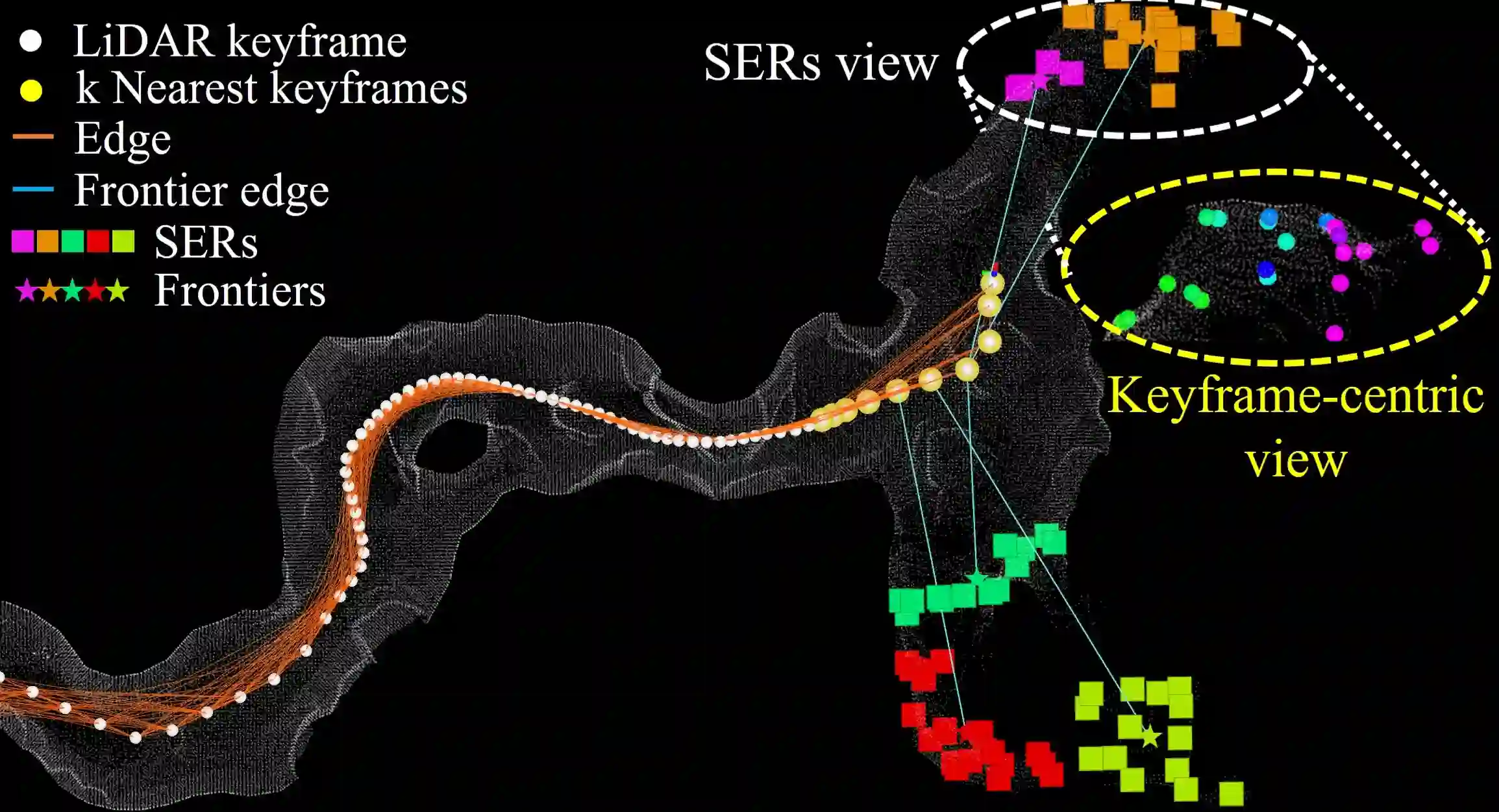
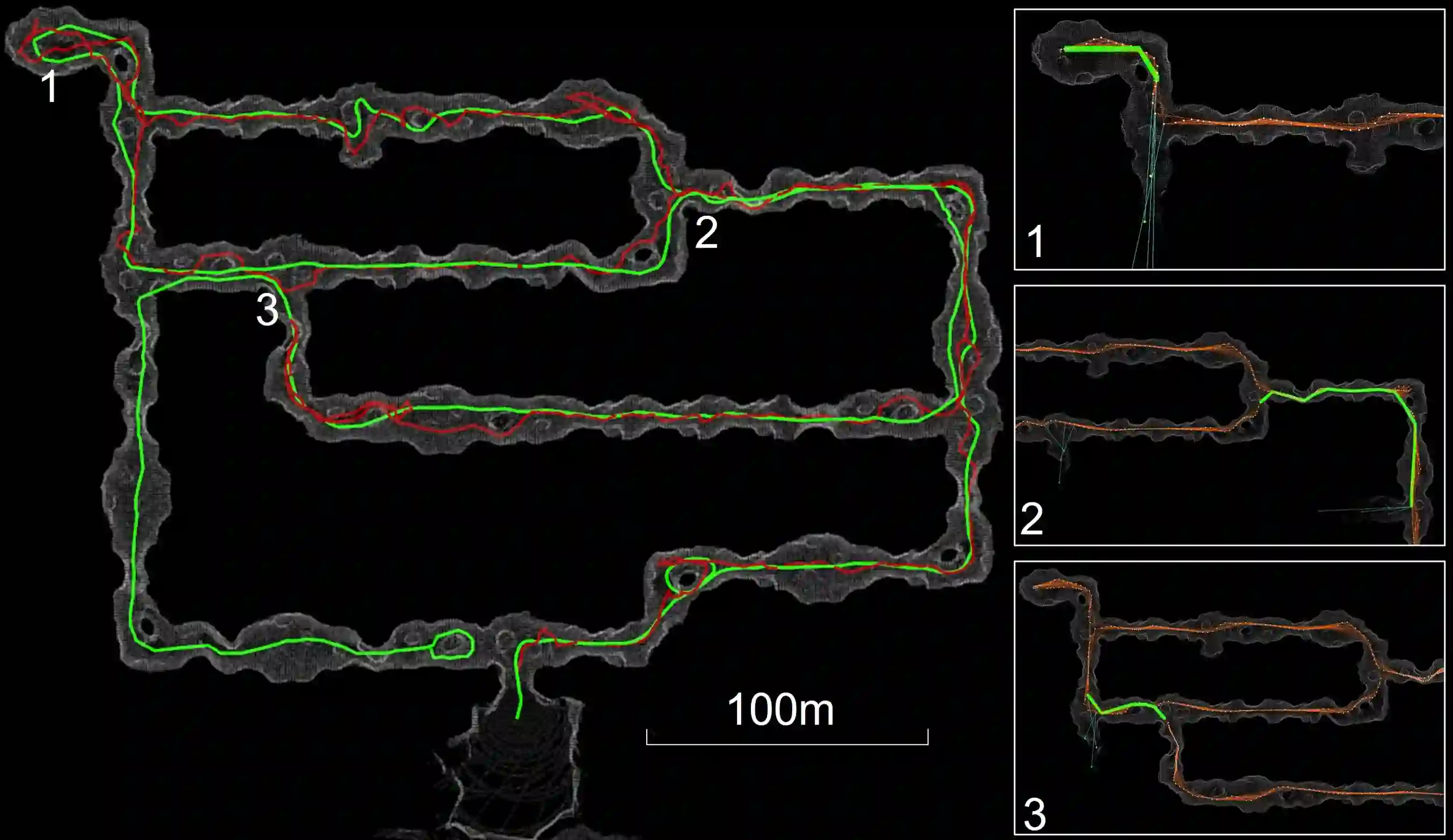
Existing exploration algorithms mainly generate frontiers using random sampling or motion primitive methods within a specific sensor range or search space. However, frontiers generated within constrained spaces lead to back-and-forth maneuvers in large-scale environments, thereby diminishing exploration efficiency. To address this issue, we propose a method that utilizes a 3D dense map to generate Segmented Exploration Regions (SERs) and generate frontiers from a global-scale perspective. In particular, this paper presents a novel topological map generation approach that fully utilizes Line-of-Sight (LOS) features of LiDAR sensor points to enhance exploration efficiency inside large-scale subterranean environments. Our topological map contains the contributions of keyframes that generate each SER, enabling rapid exploration through a switch between local path planning and global path planning to each frontier. The proposed method achieved higher explored volume generation than the state-of-the-art algorithm in a large-scale simulation environment and demonstrated a 62% improvement in explored volume increment performance. For validation, we conducted field tests using UAVs in real subterranean environments, demonstrating the efficiency and speed of our method.
翻译:暂无翻译