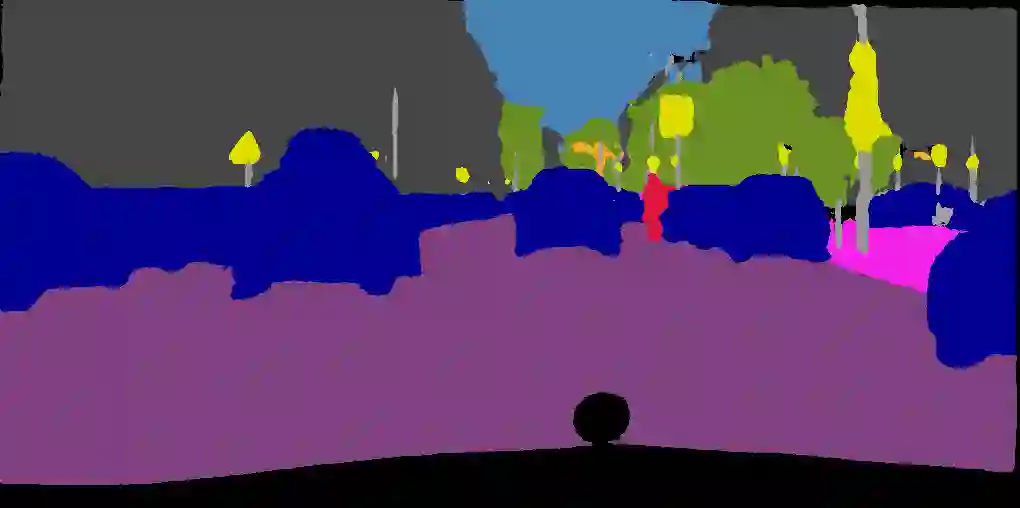
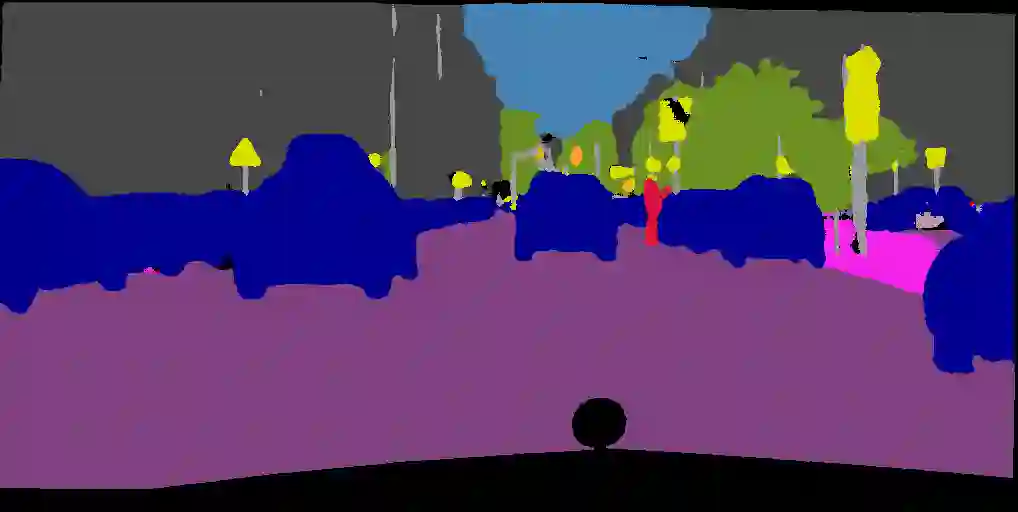
Semantic segmentation benefits robotics related applications especially autonomous driving. Most of the research on semantic segmentation is only on increasing the accuracy of segmentation models with little attention to computationally efficient solutions. The few work conducted in this direction does not provide principled methods to evaluate the different design choices for segmentation. In this paper, we address this gap by presenting a real-time semantic segmentation benchmarking framework with a decoupled design for feature extraction and decoding methods. The framework is comprised of different network architectures for feature extraction such as VGG16, Resnet18, MobileNet, and ShuffleNet. It is also comprised of multiple meta-architectures for segmentation that define the decoding methodology. These include SkipNet, UNet, and Dilation Frontend. Experimental results are presented on the Cityscapes dataset for urban scenes. The modular design allows novel architectures to emerge, that lead to 143x GFLOPs reduction in comparison to SegNet. This benchmarking framework is publicly available at "https://github.com/MSiam/TFSegmentation".
翻译:在本文中,我们通过提供实时的语义分解基准框架和分解特征提取和解码方法的分解设计设计来弥补这一差距。框架由不同的地物提取网络结构组成,如VGG16、Resnet18、移动网络和ShuffleNet。框架还包括多种用于分解的元结构,用于界定解码方法,其中包括SkippNet、UNet和Dlation Frontend。实验结果载于城市景象数据集中。模块设计使得新的结构得以出现,从而导致与SegNet相比,GFLOPs减少了143xGFLOPs。这个基准框架可在“https://github.com/MSiam/TFSegment”上公开查阅。