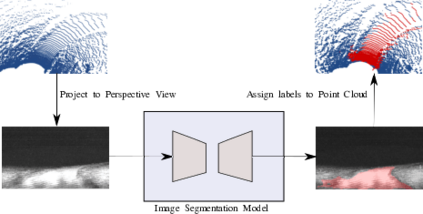
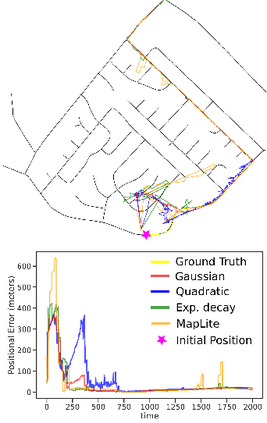
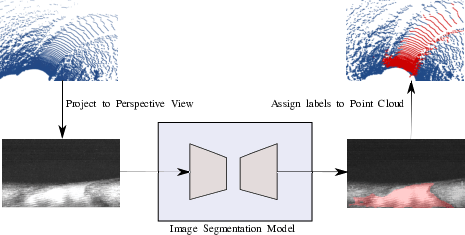
Accurate pose estimation is a fundamental ability that all mobile robots must posses in order to traverse robustly in a given environment. Much like a human, this ability is dependent on the robot's understanding of a given scene. For Autonomous Vehicles (AV's), detailed 3D maps created beforehand are widely used to augment the perceptive abilities and estimate pose based on current sensor measurements. This approach however is less suited for rural communities that are sparsely connected and cover large areas. To deal with the challenge of localizing a vehicle in a rural setting, this paper presents a data-set of rural road scenes, along with an approach for fast segmentation of roads using LIDAR point clouds. The segmented point cloud in concert with road network information from Open Street Maps (OSM) is used for pose estimation. We propose two measurement models which are compared with state of the art methods for localization on OSM for tracking as well as global localization. The results show that the proposed algorithm is able to estimate pose within a 2 sq. km area with mean accuracy of 6.5 meters.
翻译:准确的表面估计是所有移动机器人必须具备的基本能力,才能在特定环境中进行稳健的穿行。 与人类一样,这种能力取决于机器人对特定场景的理解。 对于自动飞行器(AV),事先制作的详细的三维地图被广泛用于根据当前传感器测量结果提高感知能力和估计面貌。 但是,这种方法不太适合那些联系稀少且覆盖大片地区的农村社区。为了应对农村车辆定位的挑战,本文件提供了一套农村道路场景数据,以及使用LIDAR点云快速分割道路的方法。与开放街道地图(OSM)的公路网络信息同步的断段点云用于进行表面估计。我们提出了两个测量模型,与用于跟踪和全球本地化的OSM本地化的艺术方法状况进行比较。结果显示,拟议的算法能够估计2平方公里地区内的地形,平均精确度为6.5米。