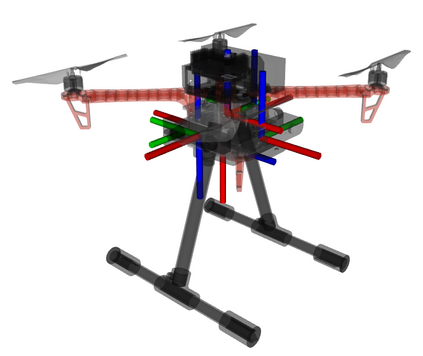
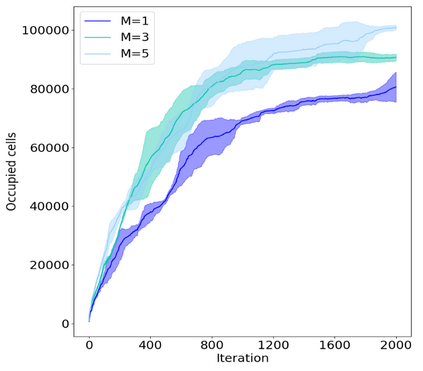
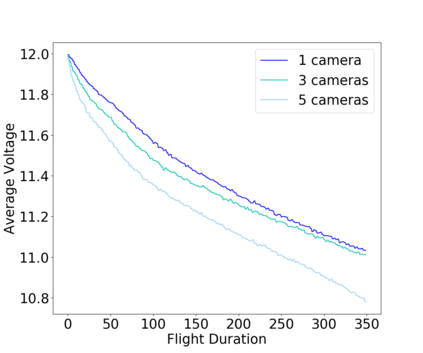
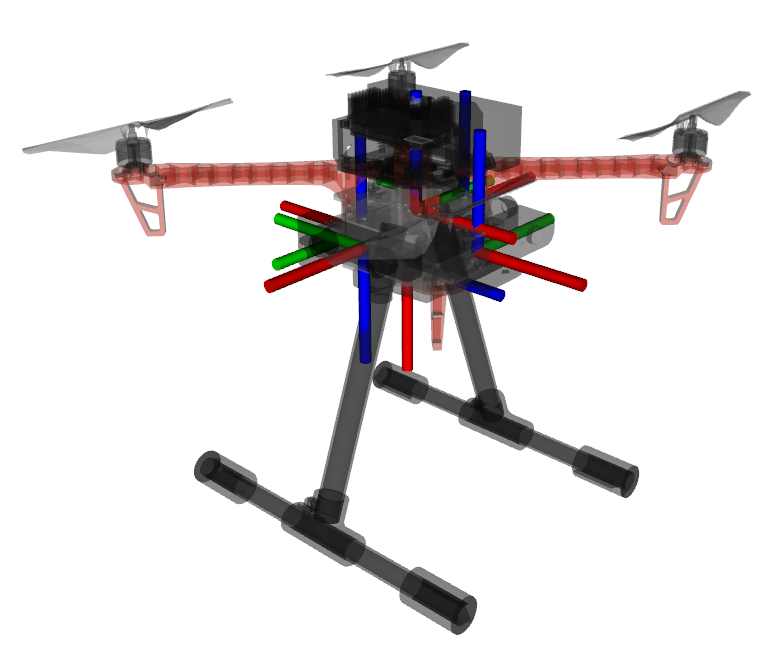
In this work we showcase the design and assessment of the performance of a multi-camera UAV, when coupled with state-of-the-art planning and mapping algorithms for autonomous navigation. The system leverages state-of-the-art receding horizon exploration techniques for Next-Best-View (NBV) planning with 3D and semantic information, provided by a reconfigurable multi stereo camera system. We employ our approaches in an autonomous drone-based inspection task and evaluate them in an autonomous exploration and mapping scenario. We discuss the advantages and limitations of using multi stereo camera flying systems, and the trade-off between number of cameras and mapping performance.
翻译:在这项工作中,我们展示了多镜头无人驾驶飞行器的设计和性能评估,同时结合自主导航的最先进的规划和绘图算法。该系统利用最先进的后视(NBV)利用3D和语义信息进行后视(3D和语义信息)规划,由可重新配置的多立体摄像系统提供。我们运用我们的方法进行自主的无人机视察任务,并在自主勘探和绘图的情况下对其进行评估。我们讨论了使用多立体相机飞行系统的优势和局限性,以及相机数量与绘图性能之间的权衡。