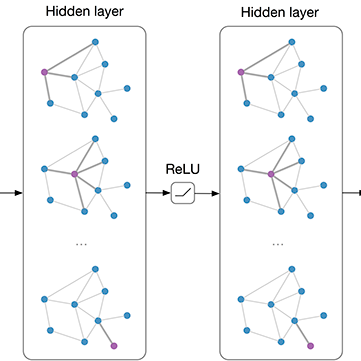
Multi-fingered hands could be used to achieve many dexterous manipulation tasks, similarly to humans, and tactile sensing could enhance the manipulation stability for a variety of objects. However, tactile sensors on multi-fingered hands have a variety of sizes and shapes. Convolutional neural networks (CNN) can be useful for processing tactile information, but the information from multi-fingered hands needs an arbitrary pre-processing, as CNNs require a rectangularly shaped input, which may lead to unstable results. Therefore, how to process such complex shaped tactile information and utilize it for achieving manipulation skills is still an open issue. This paper presents a control method based on a graph convolutional network (GCN) which extracts geodesical features from the tactile data with complicated sensor alignments. Moreover, object property labels are provided to the GCN to adjust in-hand manipulation motions. Distributed tri-axial tactile sensors are mounted on the fingertips, finger phalanges and palm of an Allegro hand, resulting in 1152 tactile measurements. Training data is collected with a data-glove to transfer human dexterous manipulation directly to the robot hand. The GCN achieved high success rates for in-hand manipulation. We also confirmed that fragile objects were deformed less when correct object labels were provided to the GCN. When visualizing the activation of the GCN with a PCA, we verified that the network acquired geodesical features. Our method achieved stable manipulation even when an experimenter pulled a grasped object and for untrained objects.
翻译:多指手可以用来完成许多模范操纵任务,类似人类的模具,触摸感知可以提高各种物体的操纵稳定性。然而,多指手的触摸传感器大小和形状各异。进动神经网络(CNN)可用于处理触动信息,但多指手的信息需要任意的预处理,因为有线电视新闻网需要重角形状的输入,这可能导致不稳定的结果。因此,如何处理这种复杂成形的物体触动信息并利用它实现操纵技能的稳定性。然而,如何处理多指手的触动传感器传感器的触动传感器,以及如何处理多指向多个物体的操纵稳定性稳定。本文展示了一个基于图形变动网络的控制方法,从触动数据中提取具有复杂感官校正校准的大地特征。此外,多指向GCN提供的物体属性标签需要任意预处理,这可能导致指尖、手指CN趋动的物体和手动的触动感动感动感应,在1152年的GLLLLLA中,我们获得了一种稳定的变压率数据,在1152的GLLLLLLA中,从而获得了一种稳定数据。