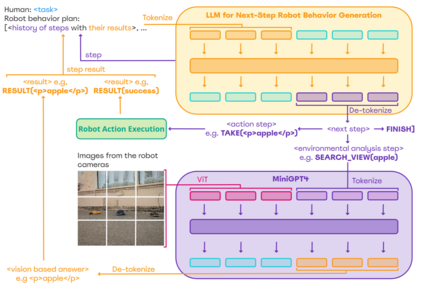
This paper introduces CognitiveDog, a pioneering development of quadruped robot with Large Multi-modal Model (LMM) that is capable of not only communicating with humans verbally but also physically interacting with the environment through object manipulation. The system was realized on Unitree Go1 robot-dog equipped with a custom gripper and demonstrated autonomous decision-making capabilities, independently determining the most appropriate actions and interactions with various objects to fulfill user-defined tasks. These tasks do not necessarily include direct instructions, challenging the robot to comprehend and execute them based on natural language input and environmental cues. The paper delves into the intricacies of this system, dataset characteristics, and the software architecture. Key to this development is the robot's proficiency in navigating space using Visual-SLAM, effectively manipulating and transporting objects, and providing insightful natural language commentary during task execution. Experimental results highlight the robot's advanced task comprehension and adaptability, underscoring its potential in real-world applications. The dataset used to fine-tune the robot-dog behavior generation model is provided at the following link: huggingface.co/datasets/ArtemLykov/CognitiveDog_dataset
翻译:暂无翻译