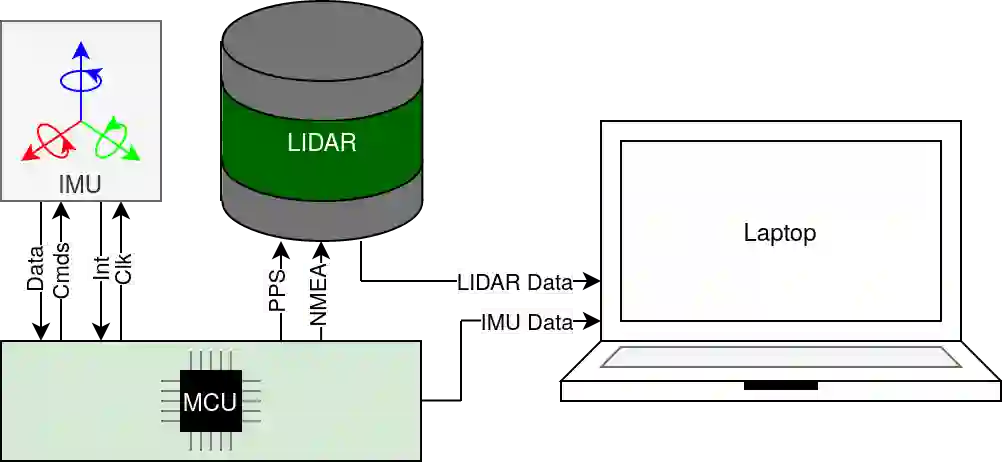
Time synchronization of multiple sensors is one of the main issues when building sensor networks. Data fusion algorithms and their applications, such as LiDAR-IMU Odometry (LIO), rely on precise timestamping. We introduce open-source LiDAR to inertial measurement unit (IMU) hardware time synchronization system, which could be generalized to multiple sensors such as cameras, encoders, other LiDARs, etc. The system mimics a GPS-supplied clock interface by a microcontroller-powered platform and provides 1 microsecond synchronization precision. In addition, we conduct an evaluation of the system precision comparing to other synchronization methods, including timestamping provided by ROS software and LiDAR inner clock, showing clear advantages over both baseline methods.
翻译:多个传感器的时间同步是建立传感器网络时的主要问题之一。数据聚合算法及其应用,如LIDAR-IMU Odography(LIO),依赖于精确的时间戳。我们向惯性测量单位(IMU)硬件时间同步系统引入开放源LIDAR,该系统可以推广到照相机、编码器、其他LIDAR等多个传感器。该系统通过微型控制器动力平台模仿全球定位系统供应的时钟界面,并提供1微秒同步精确度。此外,我们还对其他同步方法进行比较,包括ROS软件和LIDAR内部时钟提供的时间戳,对系统精确度进行了评估,显示两种基线方法的明显优势。