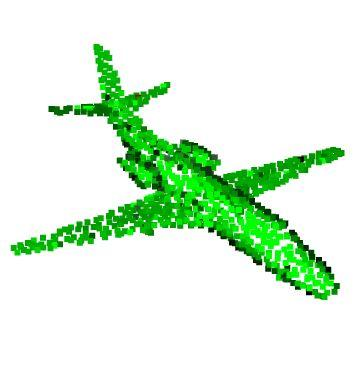
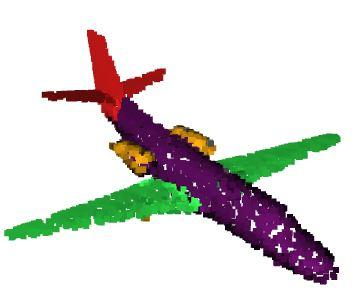
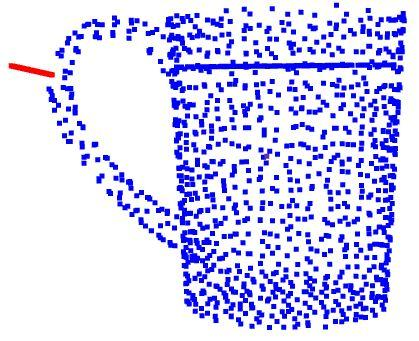
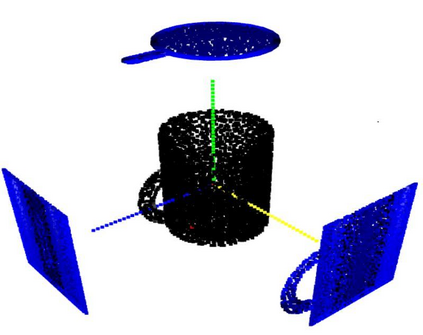
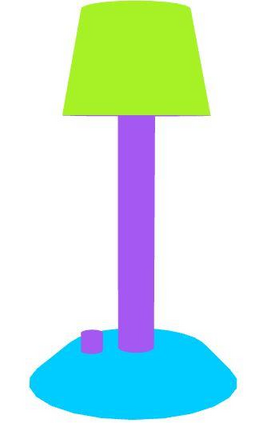
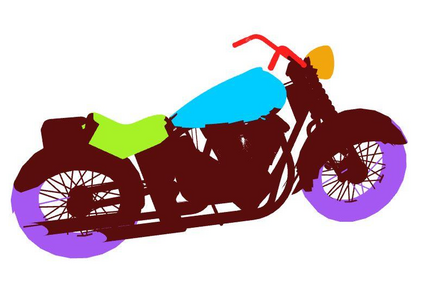
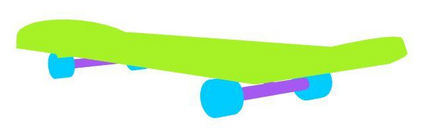
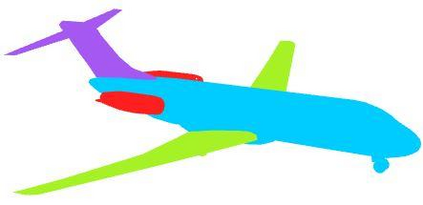
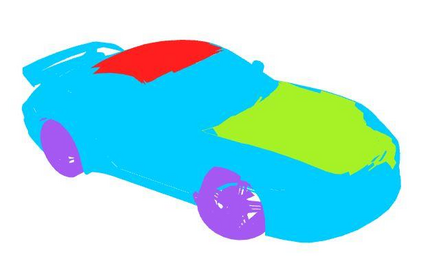
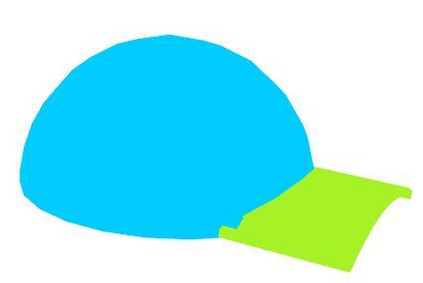
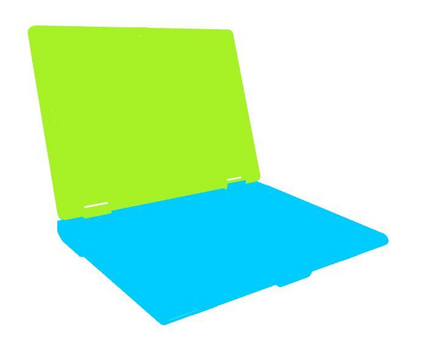
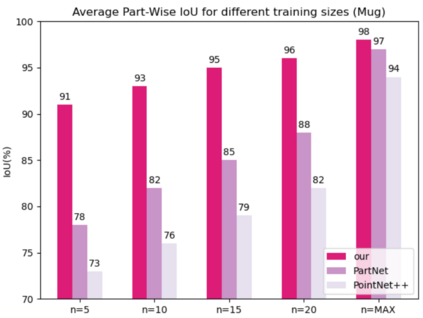
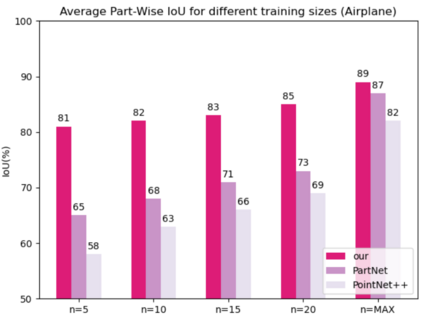
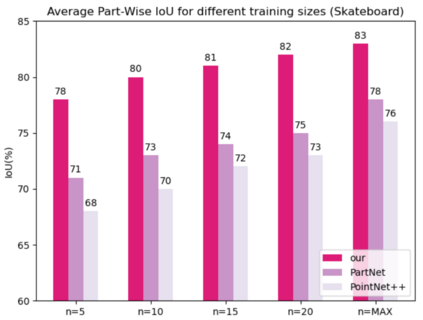
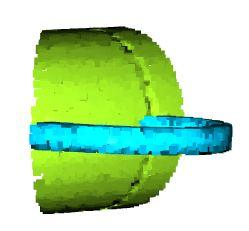
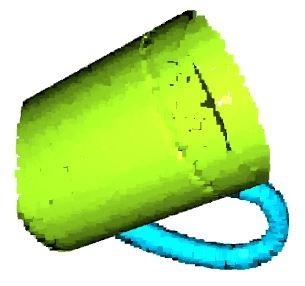
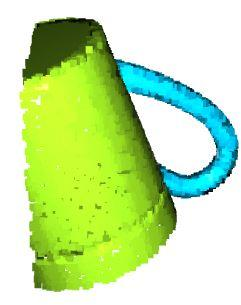
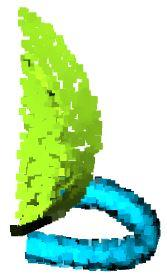
Local-HDP (for Local Hierarchical Dirichlet Process) is a hierarchical Bayesian method that has recently been used for open-ended 3D object category recognition. This method has been proven to be efficient in real-time robotic applications. However, the method is not robust to a high degree of occlusion. We address this limitation in two steps. First, we propose a novel semantic 3D object-parts segmentation method that has the flexibility of Local-HDP. This method is shown to be suitable for open-ended scenarios where the number of 3D objects or object parts is not fixed and can grow over time. We show that the proposed method has a higher percentage of mean intersection over union, using a smaller number of learning instances. Second, we integrate this technique with a recently introduced argumentation-based online incremental learning method, thereby enabling the model to handle a high degree of occlusion. We show that the resulting model produces an explicit set of explanations for the 3D object category recognition task.
翻译:本地- HDP (地方等级分解进程) 是一种等级级的巴伊西亚方法,最近用于开放的 3D 对象类别识别。 这种方法在实时机器人应用中被证明是有效的。 但是, 这种方法在高度隔离性方面不够健全。 我们分两个步骤来处理这一限制。 首先, 我们建议一种具有本地- HDP 灵活性的新型语义 3D 对象部分分割法。 这种方法被证明适合那些3D 对象或对象部件的数量没有固定并且可以随着时间的推移而增长的开放式假设情况。 我们用较少的学习实例表明, 拟议的方法在结合上具有较高比例的平均交叉性。 其次, 我们将这一方法与最近引入的基于论证的在线递增学习方法结合起来, 从而使得模型能够处理高度封闭性。 我们显示, 由此产生的模型为 3D 对象类别识别任务提供了一套明确的解释。