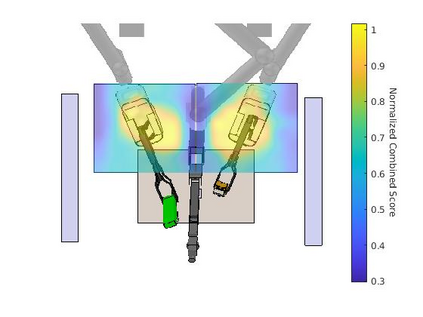
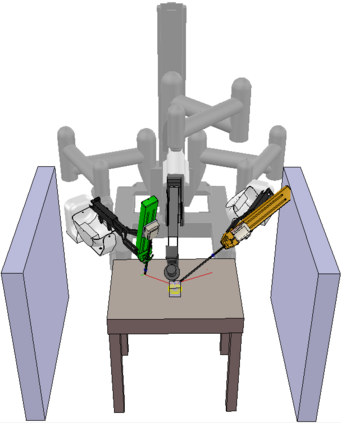
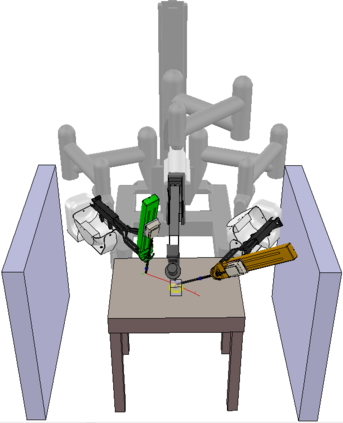
Robot arm placements are oftentimes a limitation in surgical preoperative procedures, relying on trained staff to evaluate and decide on the optimal positions for the arms. Given new and different patient anatomies, it can be challenging to make an informed choice, leading to more frequently colliding arms or limited manipulator workspaces. In this paper, we develop a method to generate the optimal manipulator base positions for the multi-port da Vinci surgical system that minimizes self-collision and environment-collision, and maximizes the surgeon's reachability inside the patient. Scoring functions are defined for each criterion so that they may be optimized over. Since for multi-manipulator setups, a large number of free parameters are available to adjust the base positioning of each arm, a challenge becomes how one can expediently assess possible setups. We thus also propose methods that perform fast queries of each measure with the use of a proxy collision-checker. We then develop an optimization method to determine the optimal position using the scoring functions. We evaluate the optimality of the base positions for the robot arms on canonical trajectories, and show that the solution yielded by the optimization program can satisfy each criterion. The metrics and optimization strategy are generalizable to other surgical robotic platforms so that patient-side manipulator positioning may be optimized and solved.
翻译:机器人手臂的放置往往在外科手术前程序上是一种限制,依靠受过训练的工作人员来评估和决定武器的最佳位置。根据新的和不同的病人解剖,作出知情选择可能具有挑战性,导致更经常的对接武器或有限的操控工作空间。在本文中,我们开发一种方法,为多端达芬奇外科手术系统创造最佳的操控基位置,以尽量减少自我凝固和环保,并使外科医生在病人体内的可达性最大化。每个标准都规定了分辨功能,以便优化它们。由于多管式安装,大量自由参数可用于调整每臂的基础定位,因此挑战就变成了如何迅速评估可能的配置。因此,我们还提出了一种方法,以使用代用碰撞校准器对每个计量进行快速查询,然后我们开发一种最优化方法,以便使用评分功能确定最佳的位置。我们评估了每个标准,以便优化它们的最佳位置。由于多端跟踪装置的设置,大量自由参数可以调整每臂的基础定位,因此,一个挑战就变成了如何迅速评估可能的配置。我们还提出了对每项计量的最佳定位的方法,通过一个最优化的机能优化的模型,可以满足其他最优化的升级的模型,从而使每个解决方案能够实现最优化的解决方案。