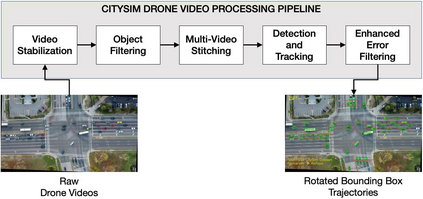
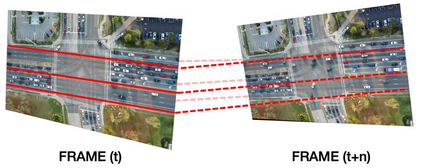
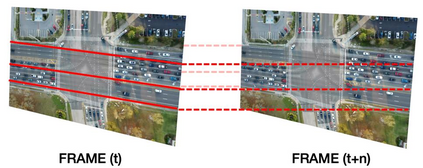
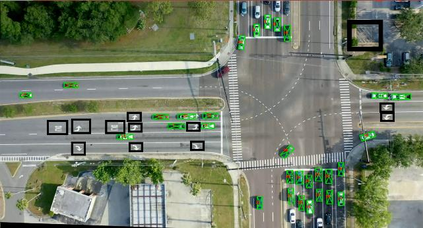
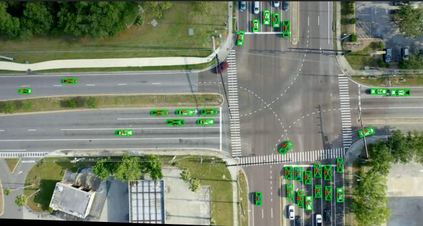
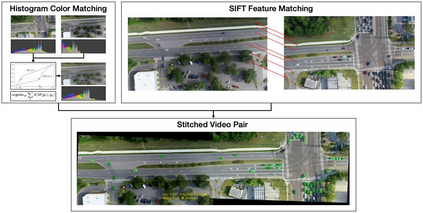
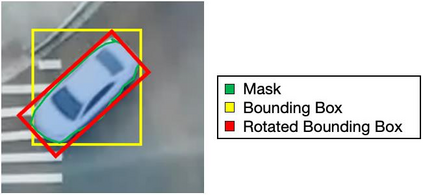
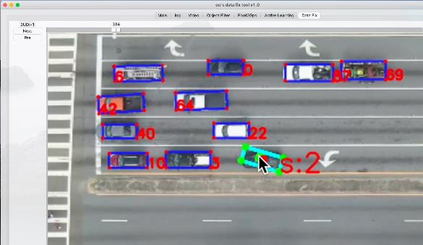
The development of safety-oriented research ideas and applications requires fine-grained vehicle trajectory data that not only has high accuracy but also captures a substantial number of critical safety events. This paper introduces the CitySim Dataset, which was devised with a core objective of facilitating safety-based research and applications. CitySim has vehicle trajectories extracted from 1140-minutes of drone videos recorded at 12 different locations. It covers a variety of road geometries including freeway basic segments, weaving segments, expressway merge/diverge segments, signalized intersections, stop-controlled intersections, and intersections without sign/signal control. CitySim trajectories were generated through a five-step procedure which ensured the trajectory accuracy. Furthermore, the dataset provides vehicle rotated bounding box information which is demonstrated to improve safety evaluation. Compared to other video-based trajectory datasets, the CitySim Dataset has significantly more critical safety events with higher severity including cut-in, merge, and diverge events. In addition, CitySim facilitates research towards digital twin applications by providing relevant assets like the recording locations'3D base maps and signal timings. These features enable more comprehensive conditions for safety research and applications such as autonomous vehicle safety and location-based safety analysis. The dataset is available online at https://github.com/ozheng1993/UCF-SST-CitySim-Dataset.
翻译:以安全为导向的研究想法和应用的开发需要精细的车辆轨迹数据,这些数据不仅具有很高的准确性,而且还能捕捉大量重要的安全事件。本文件介绍了城市Sim数据集,该数据集的核心目标是促进基于安全的研究和应用程序。城市Sim有从12个不同地点记录的1 140分钟无人驾驶录像中提取的车辆轨迹。它涵盖各种公路地理偏差,包括高速公路基本部分、编织段、快路合并/断层、信号化交叉点、中转控制交叉点和没有信号/信号控制的交叉点。城市Simjectories是通过确保轨迹准确性的五步程序生成的。此外,该数据集提供了车辆旋转的捆绑框信息,这证明可以改进安全评价。与其他基于视频的轨迹数据集相比,城市Sim数据数据集具有更为严重的安全事件,包括切入、合并和差异性事件。此外,城市SimmissionSimus通过提供相关资产,例如记录地点的自动定位S-D数据库安全性分析,从而能够进行数字双对数字双应用进行研究。