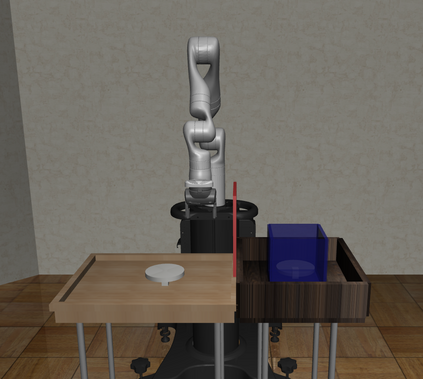
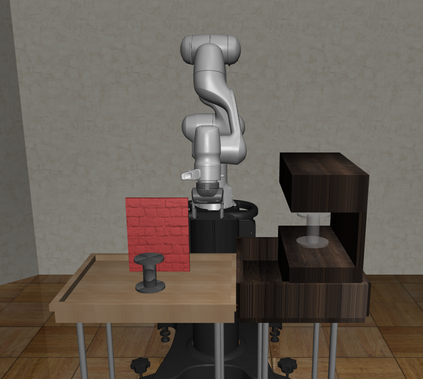
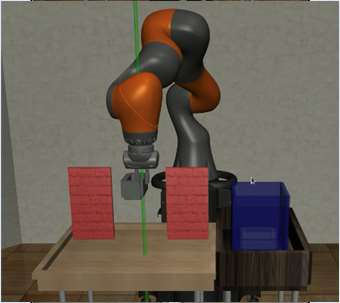
Offline reinforcement learning (RL) is a promising direction that allows RL agents to pre-train on large datasets, avoiding the recurrence of expensive data collection. To advance the field, it is crucial to generate large-scale datasets. Compositional RL is particularly appealing for generating such large datasets, since 1)~it permits creating many tasks from few components, 2)~the task structure may enable trained agents to solve new tasks by combining relevant learned components, and 3)~the compositional dimensions provide a notion of task relatedness. This paper provides four offline RL datasets for simulated robotic manipulation created using the $256$ tasks from CompoSuite [Mendez at al., 2022a]. Each dataset is collected from an agent with a different degree of performance, and consists of $256$ million transitions. We provide training and evaluation settings for assessing an agent's ability to learn compositional task policies. Our benchmarking experiments show that current offline RL methods can learn the training tasks to some extent and that compositional methods outperform non-compositional methods. Yet current methods are unable to extract the compositional structure to generalize to unseen tasks, highlighting a need for future research in offline compositional RL.
翻译:暂无翻译