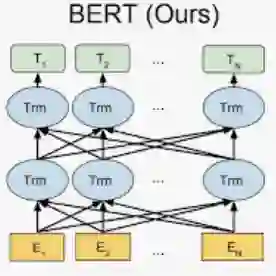
Autonomous vehicles (AVs) are more vulnerable to network attacks due to the high connectivity and diverse communication modes between vehicles and external networks. Deep learning-based Intrusion detection, an effective method for detecting network attacks, can provide functional safety as well as a real-time communication guarantee for vehicles, thereby being widely used for AVs. Existing works well for cyber-attacks such as simple-mode but become a higher false alarm with a resource-limited environment required when the attack is concealed within a contextual feature. In this paper, we present a novel automotive intrusion detection model with lightweight attribution and semantic fusion, named LSF-IDM. Our motivation is based on the observation that, when injected the malicious packets to the in-vehicle networks (IVNs), the packet log presents a strict order of context feature because of the periodicity and broadcast nature of the CAN bus. Therefore, this model first captures the context as the semantic feature of messages by the BERT language framework. Thereafter, the lightweight model (e.g., BiLSTM) learns the fused feature from an input packet's classification and its output distribution in BERT based on knowledge distillation. Experiment results demonstrate the effectiveness of our methods in defending against several representative attacks from IVNs. We also perform the difference analysis of the proposed method with lightweight models and Bert to attain a deeper understanding of how the model balance detection performance and model complexity.
翻译:暂无翻译