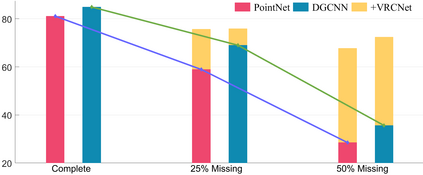
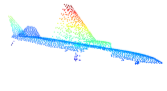
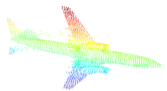
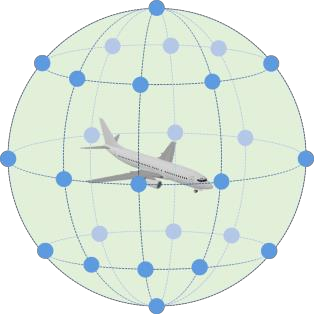
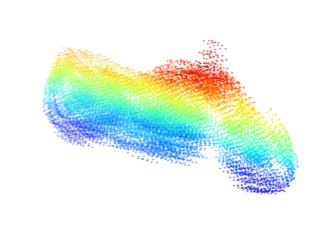
Real-scanned point clouds are often incomplete due to viewpoint, occlusion, and noise, which hampers 3D geometric modeling and perception. Existing point cloud completion methods tend to generate global shape skeletons and hence lack fine local details. Furthermore, they mostly learn a deterministic partial-to-complete mapping, but overlook structural relations in man-made objects. To tackle these challenges, this paper proposes a variational framework, Variational Relational point Completion Network (VRCNet) with two appealing properties: 1) Probabilistic Modeling. In particular, we propose a dual-path architecture to enable principled probabilistic modeling across partial and complete clouds. One path consumes complete point clouds for reconstruction by learning a point VAE. The other path generates complete shapes for partial point clouds, whose embedded distribution is guided by distribution obtained from the reconstruction path during training. 2) Relational Enhancement. Specifically, we carefully design point self-attention kernel and point selective kernel module to exploit relational point features, which refines local shape details conditioned on the coarse completion. In addition, we contribute multi-view partial point cloud datasets (MVP and MVP-40 dataset) containing over 200,000 high-quality scans, which render partial 3D shapes from 26 uniformly distributed camera poses for each 3D CAD model. Extensive experiments demonstrate that VRCNet outperforms state-of-the-art methods on all standard point cloud completion benchmarks. Notably, VRCNet shows great generalizability and robustness on real-world point cloud scans. Moreover, we can achieve robust 3D classification for partial point clouds with the help of VRCNet, which can highly increase classification accuracy.
翻译:实际扫描的点云通常由于视角,遮挡和噪声不完整,这阻碍了3D几何建模和感知。现有的点云完整方法往往会生成全局形状骨架,因此缺乏细节。此外,它们大多学习确定性的部分到完全映射,但忽略了人造物体中的结构关系。为了解决这些挑战,本文提出了一个变分框架,Variational Relational point Completion Network(VRCNet),具有两个吸引人的特性:1)概率建模。特别地,我们提出了一种双路径架构,以实现对局部和完整点云的原则性概率建模。一条路径消耗完整的点云进行重建,通过学习点VAE。另一条路径为局部点云生成完整的形状,其嵌入式分布在训练期间由重建路径获得的分布指导。2)关系增强。具体来说,我们精心设计了点自我注意力核和点选择核模块,以利用关系点特征,以在粗略完成状态下调整局部形状细节。此外,我们贡献了多视图部分点云数据集(MVP和MVP-40数据集),其中包含超过200,000个高质量扫描,为每个3D CAD模型从26个均匀分布的相机姿势渲染局部3D形状。广泛的实验证明,VRCNet在所有标准点云完成基准测试中优于现有方法。值得注意的是,VRCNet在真实世界的点云扫描中表现出了极大的泛化能力和鲁棒性。此外,在VRCNet的帮助下,我们可以获得对于部分点云的稳健3D分类,这可以极大地提高分类准确性。