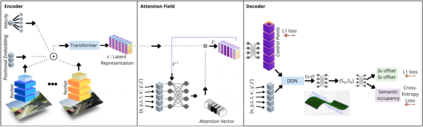
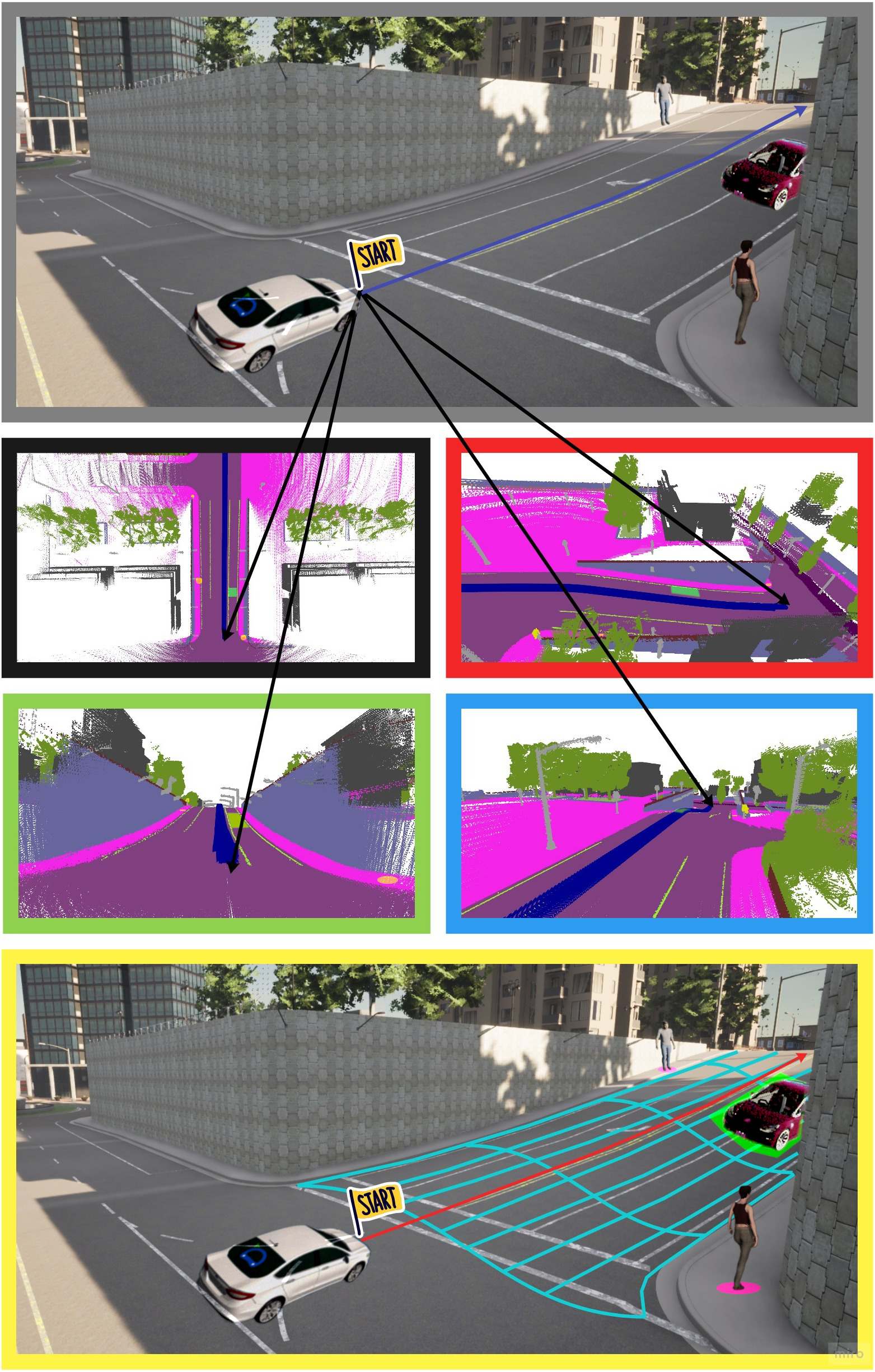
Autonomous driving requires efficient reasoning about the Spatio-temporal nature of the semantics of the scene. Recent approaches have successfully amalgamated the traditional modular architecture of an autonomous driving stack comprising perception, prediction, and planning in an end-to-end trainable system. Such a system calls for a shared latent space embedding with interpretable intermediate trainable projected representation. One such successfully deployed representation is the Bird's-Eye View(BEV) representation of the scene in ego-frame. However, a fundamental assumption for an undistorted BEV is the local coplanarity of the world around the ego-vehicle. This assumption is highly restrictive, as roads, in general, do have gradients. The resulting distortions make path planning inefficient and incorrect. To overcome this limitation, we propose Neural Manifold Representation (NMR), a representation for the task of autonomous driving that learns to infer semantics and predict way-points on a manifold over a finite horizon, centered on the ego-vehicle. We do this using an iterative attention mechanism applied on a latent high dimensional embedding of surround monocular images and partial ego-vehicle state. This representation helps generate motion and behavior plans consistent with and cognizant of the surface geometry. We propose a sampling algorithm based on edge-adaptive coverage loss of BEV occupancy grid and associated guidance flow field to generate the surface manifold while incurring minimal computational overhead. We aim to test the efficacy of our approach on CARLA and SYNTHIA-SF.
翻译:自主驱动要求高效地推理现场语义的时空性质。最近的一些方法成功地合并了由感知、预测和规划组成的自发驱动堆的传统模块式结构。 这样的系统要求共享潜伏空间,以可解释的中间可培训预测代表形式嵌入。 这种成功部署的代表方式之一是以自我为框架的鸟眼视(BEEV)场面的自我框架代表。 然而,不扭曲的BEV的基本假设是世界在自我载体周围的共鸣性。这种假设是高度限制性的,因为一般而言,道路确实有梯度。由此产生的扭曲使得路径规划效率低和不正确。为了克服这一限制,我们提议神经马内化代表,这是自主驱动任务的一种代表,它学会推导出语义和预测方位的多维度,它以自我载体格为中心。我们使用一个迭代关注机制,用于潜伏的高维度的双向内置的单层图像和部分自上层层的自我定位定位定位,在不断的地平流中,我们用SDR-L 代表方式生成一个基于地平流的地平流的自我定位的磁图。 我们用一个运动在地面上,在地面上生成的自我定位中,在不断的自我定位上生成的自我定位上生成的平流中进行运动,并进行运动。