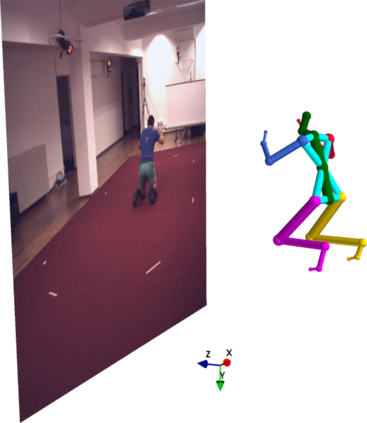
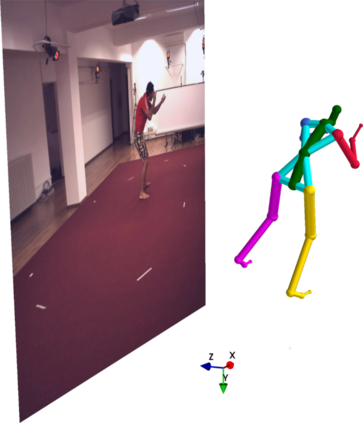
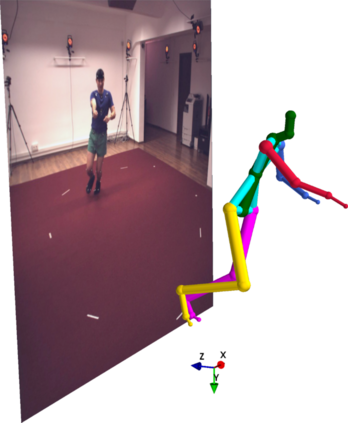
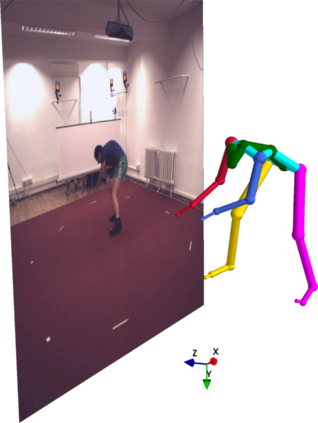
3D human pose estimation is frequently seen as the task of estimating 3D poses relative to the root body joint. Alternatively, we propose a 3D human pose estimation method in camera coordinates, which allows effective combination of 2D annotated data and 3D poses and a straightforward multi-view generalization. To that end, we cast the problem as a view frustum space pose estimation, where absolute depth prediction and joint relative depth estimations are disentangled. Final 3D predictions are obtained in camera coordinates by the inverse camera projection. Based on this, we also present a consensus-based optimization algorithm for multi-view predictions from uncalibrated images, which requires a single monocular training procedure. Although our method is indirectly tied to the training camera intrinsics, it still converges for cameras with different intrinsic parameters, resulting in coherent estimations up to a scale factor. Our method improves the state of the art on well known 3D human pose datasets, reducing the prediction error by 32% in the most common benchmark. We also reported our results in absolute pose position error, achieving 80~mm for monocular estimations and 51~mm for multi-view, on average.
翻译:3D 人形估计通常被视为相对于根体联合体的3D 配置任务。 或者,我们提议在摄像座标中采用3D 人形估计方法,将2D 附加说明的数据和3D 显示有效组合在一起,并采用直截了当的多视角概观。为此,我们将问题投向为透视方形空间,以透视方形空间为透视方形估计,将绝对深度预测和共同相对深度估计混为一谈。最后的3D 预测是通过反摄像头投影的摄像头坐标获得的。在此基础上,我们还提出了一个基于共识的优化算法,用于从未校准图像中进行多视图预测,这需要单一的单镜式训练程序。虽然我们的方法是间接地与培训相机的内在内容结合,但仍会与不同内在参数的照相机相交汇,导致一致的估算达到一个尺度系数。我们的方法改进了众所周知的3D 人形数据集的艺术状态,在最常见的基准中将预测误差减少32%。 我们还报告了我们绝对定位错误的结果,在平均角度上达到80- 毫米 和51- 毫米 。