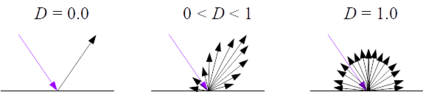
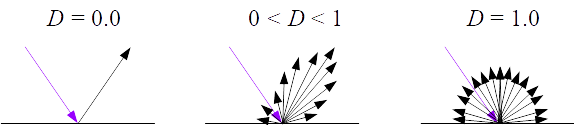
Point clouds have recently gained interest, especially for real-time applications and for 3D-scanned material, such as is used in autonomous driving, architecture, and engineering, to model real estate for renovation or display. Point clouds are associated with geometry information and attributes such as color. Be the color unique or direction-dependent (in the case of plenoptic point clouds), it reflects the colors observed by cameras displaced around the object. Hence, not only are the viewing references assumed, but the illumination spectrum and illumination geometry is also implicit. We propose a model-centric description of the 3D object, that is independent of the illumination and of the position of the cameras. We want to be able to describe the objects themselves such that, at a later stage, the rendering of the model may decide where to place illumination, from which it may calculate the image viewed by a given camera. We want to be able to describe transparent or translucid objects, mirrors, fishbowls, fog and smoke. Volumetric clouds may allow us to describe the air, however ``empty'', and introduce air particles, in a manner independent of the viewer position. For that, we rely on some eletromagnetic properties to arrive at seven attributes per voxel that would describe the material and its color or transparency. Three attributes are for the transmissivity of each color, three are for the attenuation of each color, and another attribute is for diffuseness. These attributes give information about the object to the renderer, with whom lies the decision on how to render and depict each object.
翻译:点云最近引起了人们的兴趣, 特别是实时应用和3D扫描材料, 如自主驱动、建筑和工程中使用的3D扫描材料。 点云与颜色等几何信息和属性相关。 颜色独特或方向独立( 如光点云), 它反映了在对象周围被移动的相机所观察到的颜色。 因此, 不仅假设了显示引用, 照明频谱和光度也暗含。 我们提议3D对象的模型中心描述, 它独立于照明和摄像头位置。 我们希望能够描述对象本身的几何。 点云与颜色信息和颜色信息相关。 模型的构造可以决定放置点在哪里, 它可以从中计算一个相机周围被移动的图像所观察到的颜色。 因此, 我们想要能够描述透明或透明对象、 镜像、 烟雾和烟雾。 量云可以让我们描述空气中的某个对象, 但是“ 信任对象” 和摄像头的位置。 我们想要能够描述这些对象本身的颜色属性, 并且引入每个颜色的颜色特性, 以一个独立的方式来描述每个颜色的颜色属性, 。