Keras实例:PointNet点云分类
【导读】点云的分类,检测和分割是计算机视觉中的核心问题。本示例实现了点云深度学习论文PointNet。
原文链接:
https://keras.io/examples/vision/pointnet/
准备工作
首先使用下列命令安装trimesh库,这个包用于可视化数据:
pip install trimesh然后安装引入相应的库
import osimport globimport trimeshimport numpy as npimport tensorflow as tffrom tensorflow import kerasfrom tensorflow.keras import layersfrom matplotlib import pyplot as plttf.random.set_seed(1234)
加载数据集
我们使用ModelNet10 数据集,它是ModelNet40数据集中的一部分,首先下载数据:
DATA_DIR = tf.keras.utils.get_file("modelnet.zip","http://3dvision.princeton.edu/projects/2014/3DShapeNets/ModelNet10.zip",extract=True,)DATA_DIR = os.path.join(os.path.dirname(DATA_DIR), "ModelNet10")
然后我们可以用trimesh工具可视化数据(3D模型):
mesh = trimesh.load(os.path.join(DATA_DIR, "chair/train/chair_0001.off"))mesh.show()
我们可以将从3D点云采样,并用matplotlib可视化:
points = mesh.sample(2048)fig = plt.figure(figsize=(5, 5))ax = fig.add_subplot(111, projection="3d")ax.scatter(points[:, 0], points[:, 1], points[:, 2])ax.set_axis_off()plt.show()
然后我们解析数据,并将之转换成TensorFlow能使用的数据:
def parse_dataset(num_points=2048):train_points = []train_labels = []test_points = []test_labels = []class_map = {}folders = glob.glob(os.path.join(DATA_DIR, "[!README]*"))for i, folder in enumerate(folders):print("processing class: {}".format(os.path.basename(folder)))# store folder name with ID so we can retrieve laterclass_map[i] = folder.split("/")[-1]# gather all filestrain_files = glob.glob(os.path.join(folder, "train/*"))test_files = glob.glob(os.path.join(folder, "test/*"))for f in train_files:train_points.append(trimesh.load(f).sample(num_points))train_labels.append(i)for f in test_files:test_points.append(trimesh.load(f).sample(num_points))test_labels.append(i)return (np.array(train_points),np.array(test_points),np.array(train_labels),np.array(test_labels),class_map,)
然后设置采样的点与batch大小:
NUM_POINTS = 2048NUM_CLASSES = 10BATCH_SIZE = 32train_points, test_points, train_labels, test_labels, CLASS_MAP = parse_dataset(NUM_POINTS)
使用 tf.data.Dataset() 构建数据集:
def augment(points, label):# jitter pointspoints += tf.random.uniform(points.shape, -0.005, 0.005, dtype=tf.float64)# shuffle pointspoints = tf.random.shuffle(points)return points, labeltrain_dataset = tf.data.Dataset.from_tensor_slices((train_points, train_labels))test_dataset = tf.data.Dataset.from_tensor_slices((test_points, test_labels))train_dataset = train_dataset.shuffle(len(train_points)).map(augment).batch(BATCH_SIZE)test_dataset = test_dataset.shuffle(len(test_points)).batch(BATCH_SIZE)
构建模型
定义卷积层与全连接层
def conv_bn(x, filters):x = layers.Conv1D(filters, kernel_size=1, padding="valid")(x)x = layers.BatchNormalization(momentum=0.0)(x)return layers.Activation("relu")(x)def dense_bn(x, filters):x = layers.Dense(filters)(x)x = layers.BatchNormalization(momentum=0.0)(x)return layers.Activation("relu")(x)
PointNet有两个核心元素:MLP层和一个Transformer(T-net)。
class OrthogonalRegularizer(keras.regularizers.Regularizer):def __init__(self, num_features, l2reg=0.001):self.num_features = num_featuresself.l2reg = l2regself.eye = tf.eye(num_features)def __call__(self, x):x = tf.reshape(x, (-1, self.num_features, self.num_features))xxt = tf.tensordot(x, x, axes=(2, 2))xxt = tf.reshape(xxt, (-1, self.num_features, self.num_features))return tf.reduce_sum(self.l2reg * tf.square(xxt - self.eye))
def tnet(inputs, num_features):# Initalise bias as the indentity matrixbias = keras.initializers.Constant(np.eye(num_features).flatten())reg = OrthogonalRegularizer(num_features)x = conv_bn(inputs, 32)x = conv_bn(x, 64)x = conv_bn(x, 512)x = layers.GlobalMaxPooling1D()(x)x = dense_bn(x, 256)x = dense_bn(x, 128)x = layers.Dense(num_features * num_features,kernel_initializer="zeros",bias_initializer=bias,activity_regularizer=reg,)(x)feat_T = layers.Reshape((num_features, num_features))(x)# Apply affine transformation to input featuresreturn layers.Dot(axes=(2, 1))([inputs, feat_T])
inputs = keras.Input(shape=(NUM_POINTS, 3))x = tnet(inputs, 3)x = conv_bn(x, 32)x = conv_bn(x, 32)x = tnet(x, 32)x = conv_bn(x, 32)x = conv_bn(x, 64)x = conv_bn(x, 512)x = layers.GlobalMaxPooling1D()(x)x = dense_bn(x, 256)x = layers.Dropout(0.3)(x)x = dense_bn(x, 128)x = layers.Dropout(0.3)(x)outputs = layers.Dense(NUM_CLASSES, activation="softmax")(x)model = keras.Model(inputs=inputs, outputs=outputs, name="pointnet")model.summary()
训练模型
使用 .compile() 与.fit() 训练模型
model.compile(loss="sparse_categorical_crossentropy",optimizer=keras.optimizers.Adam(learning_rate=0.001),metrics=["sparse_categorical_accuracy"],)model.fit(train_dataset, epochs=20, validation_data=test_dataset)
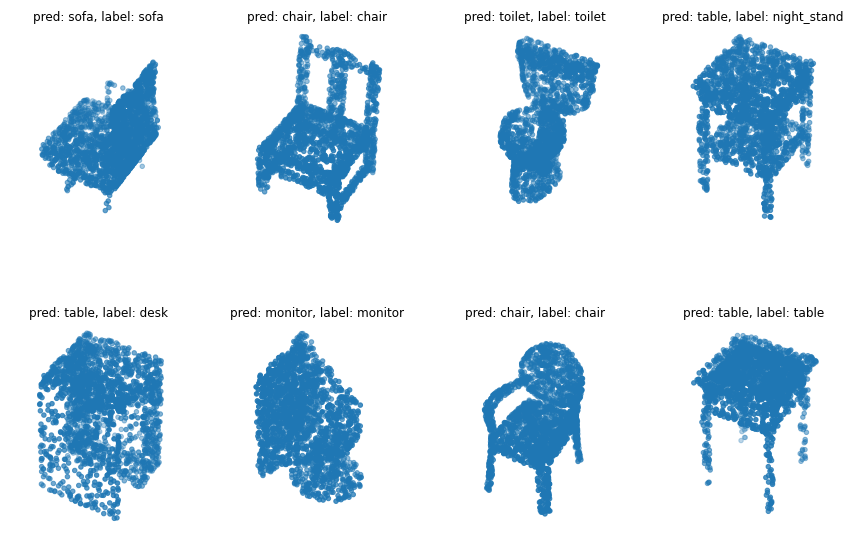
可视化结果
data = test_dataset.take(1)points, labels = list(data)[0]points = points[:8, ...]labels = labels[:8, ...]# run test data through modelpreds = model.predict(points)preds = tf.math.argmax(preds, -1)points = points.numpy()# plot points with predicted class and labelfig = plt.figure(figsize=(15, 10))for i in range(8):ax = fig.add_subplot(2, 4, i + 1, projection="3d")ax.scatter(points[i, :, 0], points[i, :, 1], points[i, :, 2])ax.set_title("pred: {:}, label: {:}".format(CLASS_MAP[preds[i].numpy()], CLASS_MAP[labels.numpy()[i]]))ax.set_axis_off()plt.show()



登录查看更多
相关内容
Arxiv
10+阅读 · 2018年3月20日
相关主题




相关VIP内容
相关资讯