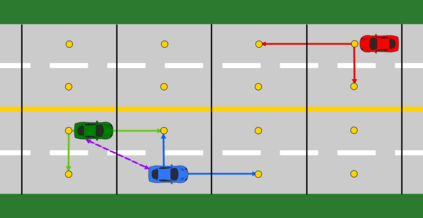
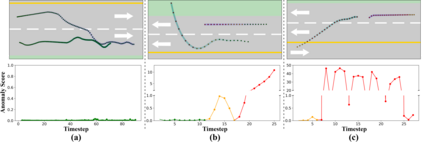
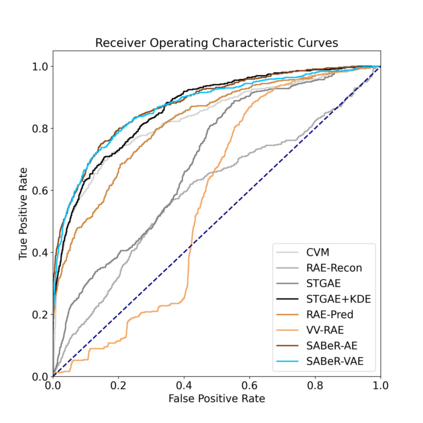
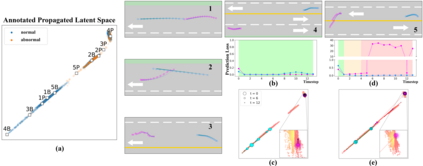
In autonomous driving, detection of abnormal driving behaviors is essential to ensure the safety of vehicle controllers. Prior works in vehicle anomaly detection have shown that modeling interactions between agents improves detection accuracy, but certain abnormal behaviors where structured road information is paramount are poorly identified, such as wrong-way and off-road driving. We propose a novel unsupervised framework for highway anomaly detection named Structural Attention-Based Recurrent VAE (SABeR-VAE), which explicitly uses the structure of the environment to aid anomaly identification. Specifically, we use a vehicle self-attention module to learn the relations among vehicles on a road, and a separate lane-vehicle attention module to model the importance of permissible lanes to aid in trajectory prediction. Conditioned on the attention modules' outputs, a recurrent encoder-decoder architecture with a stochastic Koopman operator-propagated latent space predicts the next states of vehicles. Our model is trained end-to-end to minimize prediction loss on normal vehicle behaviors, and is deployed to detect anomalies in (ab)normal scenarios. By combining the heterogeneous vehicle and lane information, SABeR-VAE and its deterministic variant, SABeR-AE, improve abnormal AUPR by 18% and 25% respectively on the simulated MAAD highway dataset over STGAE-KDE. Furthermore, we show that the learned Koopman operator in SABeR-VAE enforces interpretable structure in the variational latent space. The results of our method indeed show that modeling environmental factors is essential to detecting a diverse set of anomalies in deployment. For code implementation, please visit https://sites.google.com/illinois.edu/saber-vae.
翻译:在自主驾驶中,检测异常驾驶行为对于确保车辆控制员的安全至关重要。车辆异常现象检测的先前工作表明,代理商之间的模拟互动提高了检测准确性,但某些结构化道路信息至关重要的异常行为,例如错误道路和离路驾驶等,却未被很好地发现。我们提议为高速公路异常现象检测建立一个新的不受监督的框架,名为“结构性关注”的经常性VAE(SABER-VAE),明确使用环境结构来帮助识别异常现象。具体地说,我们使用一个车辆自我注意模块来了解公路上车辆之间的关系,以及一个单独的车道关注模块来模拟可允许通道对于轨迹预测的重要性。在关注模块输出时,一个经常性的编码解码器-解码器结构,配有随机的Koopman操作员操作员的操作员智能潜伏空间预测下一状况。我们经过培训的终端对端端端将正常车辆行为的预测损失降到最低程度,并安装在(ab)正常情景中发现基本异常情况。通过将可变式车辆和车道的可变式模型合并,SABR-VAO-VA的模型显示其执行结果。