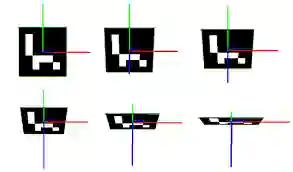
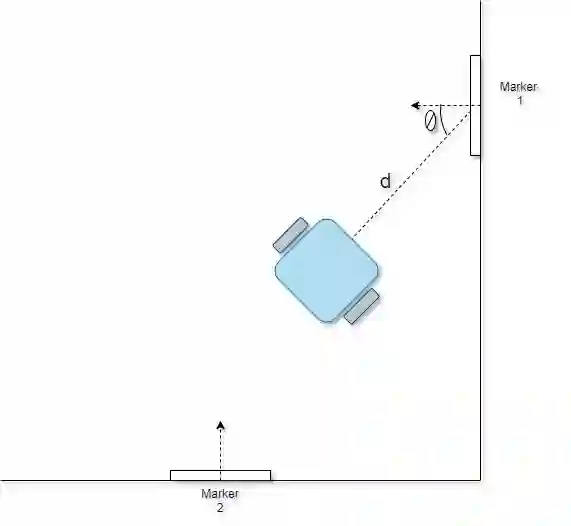
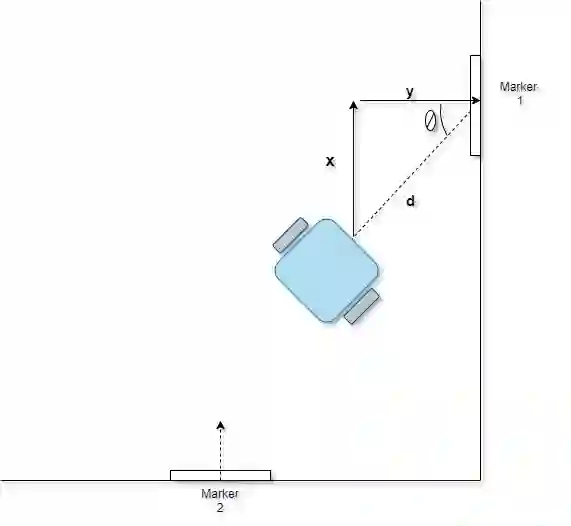
This paper explores a method of localization and navigation of indoor mobile robots using a node graph of landmarks that are based on fiducial markers. The use of ArUco markers and their 2D orientation with respect to the camera of the robot and the distance to the markers from the camera is used to calculate the relative position of the robot as well as the relative positions of other markers. The proposed method combines aspects of beacon-based navigation and Simultaneous Localization and Mapping based navigation. The implementation of this method uses a depth camera to obtain the distance to the marker. After calculating the required orientation of the marker, it relies on odometry calculations for tracking the position after localization with respect to the marker. Using the odometry and the relative position of one marker, the robot is then localized with respect to another marker. The relative positions and orientation of the two markers are then calculated. The markers are represented as nodes and the relative distances and orientations are represented as edges connecting the nodes and a node graph can be generated that represents a map for the robot. The method was tested on a wheeled humanoid robot with the objective of having it autonomously navigate to a charging station inside a room. This objective was successfully achieved and the limitations and future improvements are briefly discussed.
翻译:本文探索室内移动机器人的定位和导航方法, 使用基于标记的标志节点图, 并使用基于标记的标志节点图。 使用 ArUco 标记及其 2D 方向图, 来计算机器人的相机的相机位置和与相机的距离, 用来计算机器人的相对位置, 以及其他标记的相对位置。 提议的方法结合了信标导航和同步本地化和绘图导航的方方面面。 采用这种方法, 使用深度相机获取标记的距离。 在计算标记所需的方向后, 它依靠对标记位置的odoco 标记及其 2D 方向的计算来跟踪标记的定位。 使用一个标记的奥多度测量法和相对位置, 机器人随后对另一个标记的相对位置进行本地化。 然后计算两个标记的相对位置和方向。 标记作为节点, 相对距离和方向代表着连接节点的边缘, 并且可以生成一个代表机器人地图的节点图。 在计算标记后, 它依赖于对标记的定位的定位值计算方法, 是在一个方向上进行快速的测试, 在一个方向上, 在一个方向上, 在一个方向上进行一个方向上进行快速的飞行器上进行测量上, 这是在一个方向上,, 在一个方向上, 在一个方向上, 在一个方向上进行一个方向上, 在一个方向上, 顺利地上进行一个方向上, 在一个方向上, 在一个方向上进行一个方向上进行一个方向上,,,,,, 在一个方向上, 在一个方向上, 在一个方向上, 在一个方向上, 在一个方向上, 在一个方向上, 在一个方向上, 在一个方向上, 在一个方向上, 在一个方向上, 进行一个方向上, 在一个方向上, 在一个方向上, 上, 上, 上,,, 上,, 进行着一个,,,,,,,,,,,,,,,,,,,,,,,,,,,, 和 一个 和 一个 和 一个 和 一个 和 一个, 一个,,,,,,,