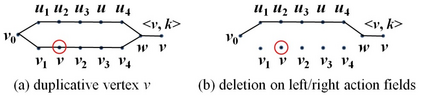
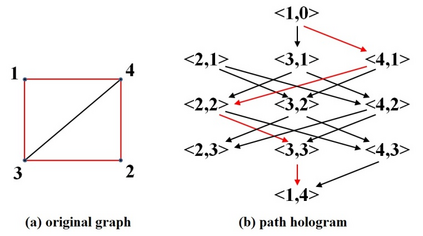
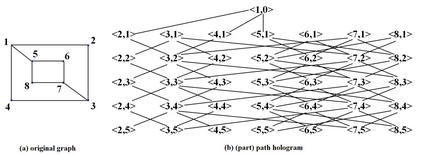
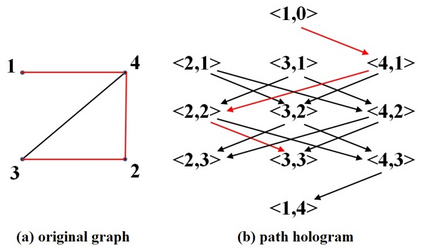
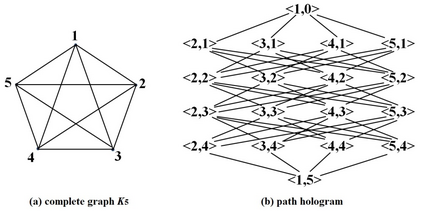
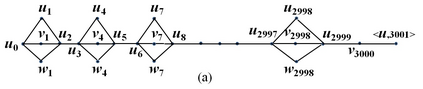
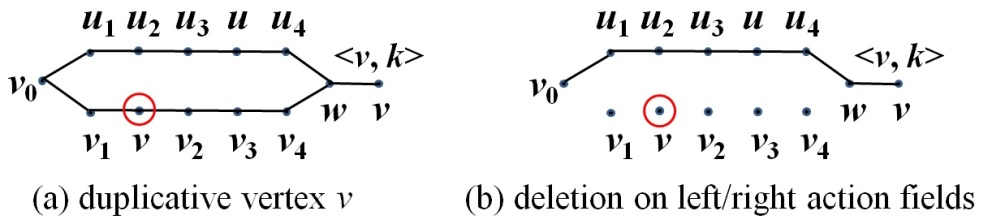
In this paper we present the first deterministic polynomial time algorithm for determining the existence of a Hamiltonian cycle and finding a Hamiltonian cycle in general graphs. Our algorithm can also resolve the Hamiltonian path problem in the traceable graphs. The space complexity of our algorithm is O(n^4). The time complexity are theoretically O(n^5*d^2) on average and O(n^6*d^2) in the worst case respectively, where d is the maximum degree of vertex. With parallel computing, the space complexity can be improved to O(n^3) and the time complexity to O(n^3*d^2) on average and O(n^4*d^2) in the worst case. We construct the corresponding path hologram transformed from the original graph and compute the path set, which is a collection of segment sets consisting of all the vertices located on the same segment layer among all the longest basic paths, of every vertex with dynamic programming. The path hologram is a multi-segment graph with the vertex <u, k> where u is a vertex and k is the segment layer of u in the path hologram. To ensure each path stored in the path set is legal and each segment set of the path set contains only valid vertices, the key strategy of our method is the "consecutive" deleting-replenishing operations recursively on the left/right action field of a vertex, respectively. The greatest contribution of our method is the path set in which all the legal paths can be stored in O(n^2) space for a complete graph of order n. In fact, our algorithm can be directly applied to the original graph. Besides, our algorithm can deal with the finite general graphs including undirected, directed, and mixed. As a result, the well-known problem HCP in NPC can be now resolved practically in deterministic polynomial time for general graphs in the worst case.
翻译:在本文中, 我们分别展示了第一个确定性多元时间算法, 用以确定汉密尔顿周期的存在, 并在一般图形中找到汉密尔顿周期。 我们的算法也可以在可追踪的图形中解决汉密尔顿路径问题。 我们算法的空间复杂性是 O( n) 4 。 我们算法的空间复杂性是平均的 O( n)5* d ⁇ 2) 和最坏的 O( n=6* d ⁇ 2) 。 时间复杂性是理论上的 O( n) 6* d ⁇ 2, 最糟糕的 。 通过平行计算, 空间复杂性可以改进为 O( n) (n) 3), 和 平均的 O( n) 3* d=2 和最坏的 O( n) 4 4 * 2 ) 。 我们从原始图中转换成相应的路径, 由同一段层的所有顶端的顶端的顶端构成部分组成, 由每个左端的顶端的顶端的顶端的直路段组成 。 右端的直路段的直路图可以显示为我们右端的直径, 。 右端的直路段的直径直为直径的直径直为直行的直路段的直路段, 。 。 。 。 。 。 右端的直向的直路段的直行的直向的直行的直向的直向的直向的直路段的直向的直向的直向的直行, 。 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直向的直向的直向的直行, 直向的直行, 直行, 直行, 直行, 直路, 直路, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直至直至直至直路, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直行, 直行,