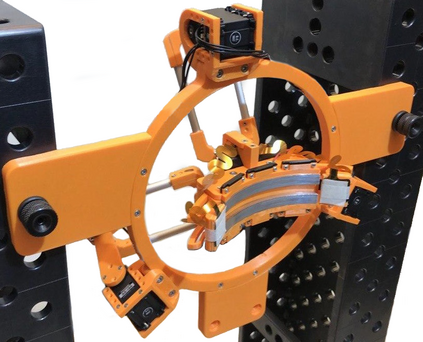
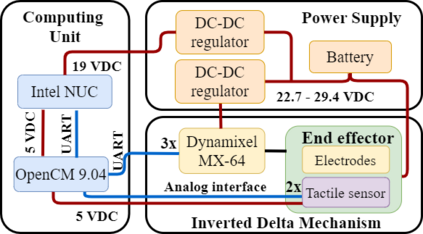
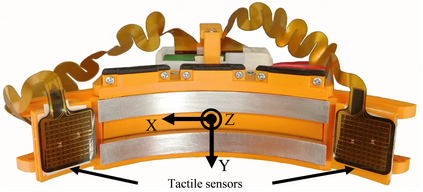
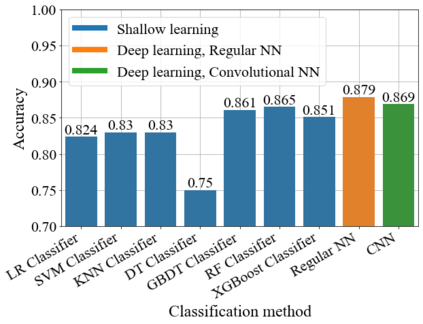
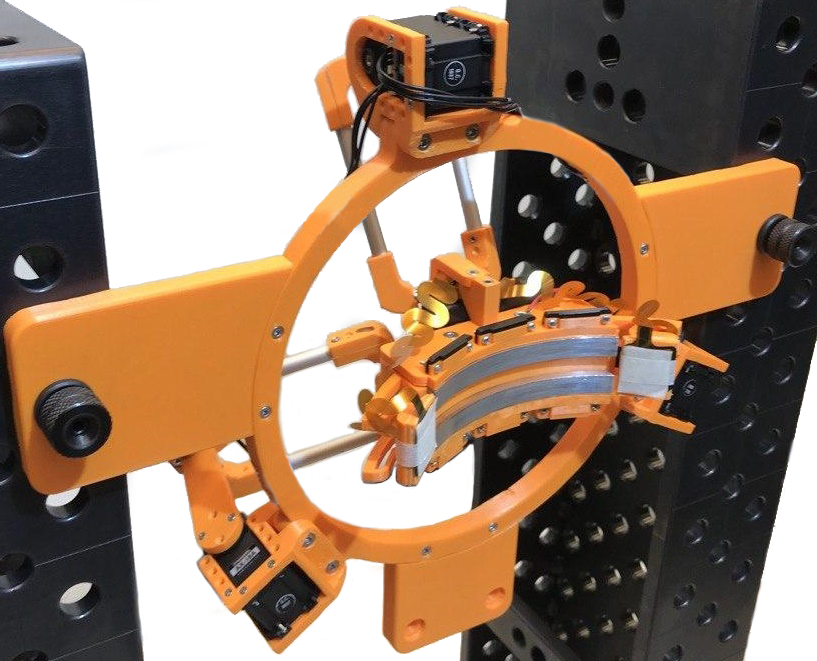
DeltaCharger is a novel charging robot with an Inverted Delta structure for 3D positioning of electrodes to achieve robust and safe transferring energy between two mobile robots. The embedded high-fidelity tactile sensors allow to estimate the angular, vertical and horizontal misalignments between electrodes on the charger mechanism and electrodes on the target robot using pressure data on the contact surfaces. This is crucial for preventing a short circuit. In this paper, the mechanism of the developed prototype and evaluation study of different machine learning models for misalignment prediction are presented. The experimental results showed that the proposed system can measure the angle, vertical and horizontal values of misalignment from pressure data with an accuracy of 95.46%, 98.2%, and 86.9%, respectively, using a Convolutional Neural Network (CNN). DeltaCharger can potentially bring a new level of charging systems and improve the prevalence of mobile autonomous robots.
翻译:Deltasuder 是一个新型的机器人,用反向三角形结构对电极进行三维三角形定位,以实现两个移动机器人之间稳健和安全的能量传输。嵌入的高纤维触觉传感器允许使用接触表面的压力数据来估计充电器机上的电极与目标机器人上电极之间的角、垂直和水平不匹配。这对于防止短路至关重要。在本文中,展示了为不同机器学习模型而开发的原型和评估研究机制,以进行不匹配预测。实验结果表明,拟议的系统可以分别用95.46%、98.2%和86.9%的精确度测量压力数据中不匹配的角值、垂直值和水平值,使用进化神经网络(CNN)进行测量。DeltaAugtor有可能带来新的充电系统,提高移动自主机器人的普及率。