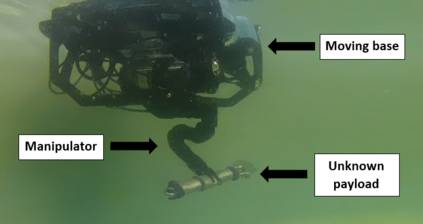
The underwater environment poses a complex problem for developing autonomous capabilities for Underwater Vehicle Manipulator Systems (UVMSs). The modeling of UVMSs is a complicated and costly process due to the highly nonlinear dynamics and the presence of unknown hydrodynamical effects. This is aggravated in tasks where the manipulation of objects is necessary, as this may not only introduce external disturbances that can lead to a fast degradation of the control system performance, but also requires the coordinating with a vision system for the correct grasping and operation of the object. In this article, we introduce a control strategy for UVMSs working with unknown payloads. The proposed control strategy is based on a data-driven optimal controller. We present a number of experimental results showing the benefits of the proposed strategy. Furthermore, we include a discussion regarding the visual perception requirements for the UVMS in order to achieve full autonomy in underwater manipulation tasks of unknown payloads.
翻译:水下环境对开发水下车辆操纵系统(UVMS)的自主能力构成复杂问题。由于高度非线性动态和存在未知的流体动力效应,对UVMS的建模是一个复杂和昂贵的过程,在需要操纵物体的任务中,情况更为严重,因为这不仅会引发外部干扰,导致控制系统性能迅速退化,而且还需要与一个视觉系统协调,以便正确掌握和操作物体。在本条中,我们引入了对使用未知有效载荷的UVMS的控制战略。拟议的控制战略以数据驱动的最佳控制器为基础。我们提出了一些实验结果,显示了拟议战略的益处。此外,我们还包括讨论对UVMS的视觉需求,以便实现未知有效载荷在水下操作任务中的完全自主。