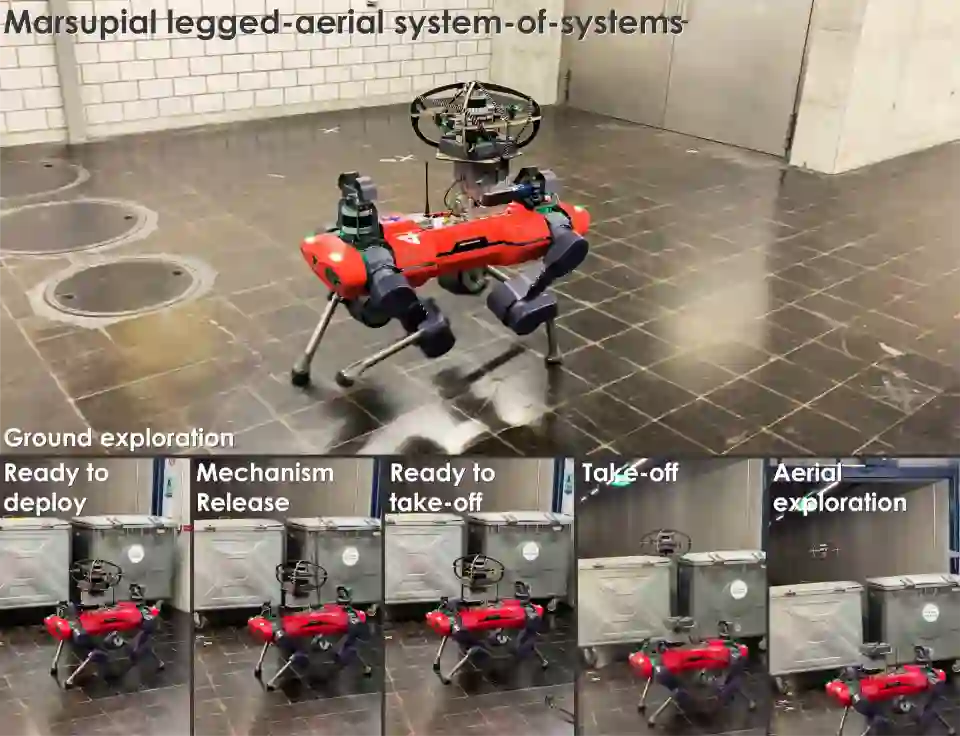
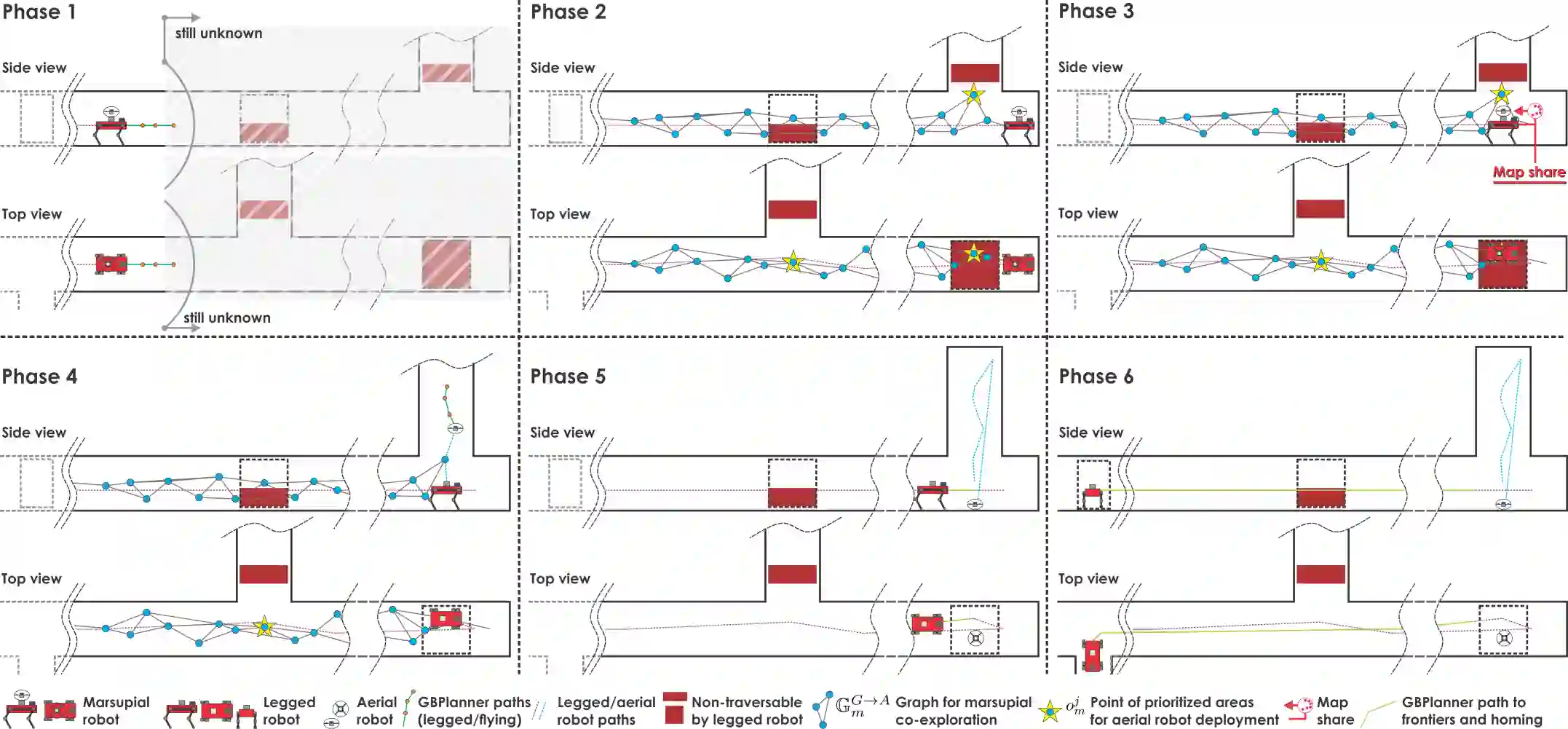
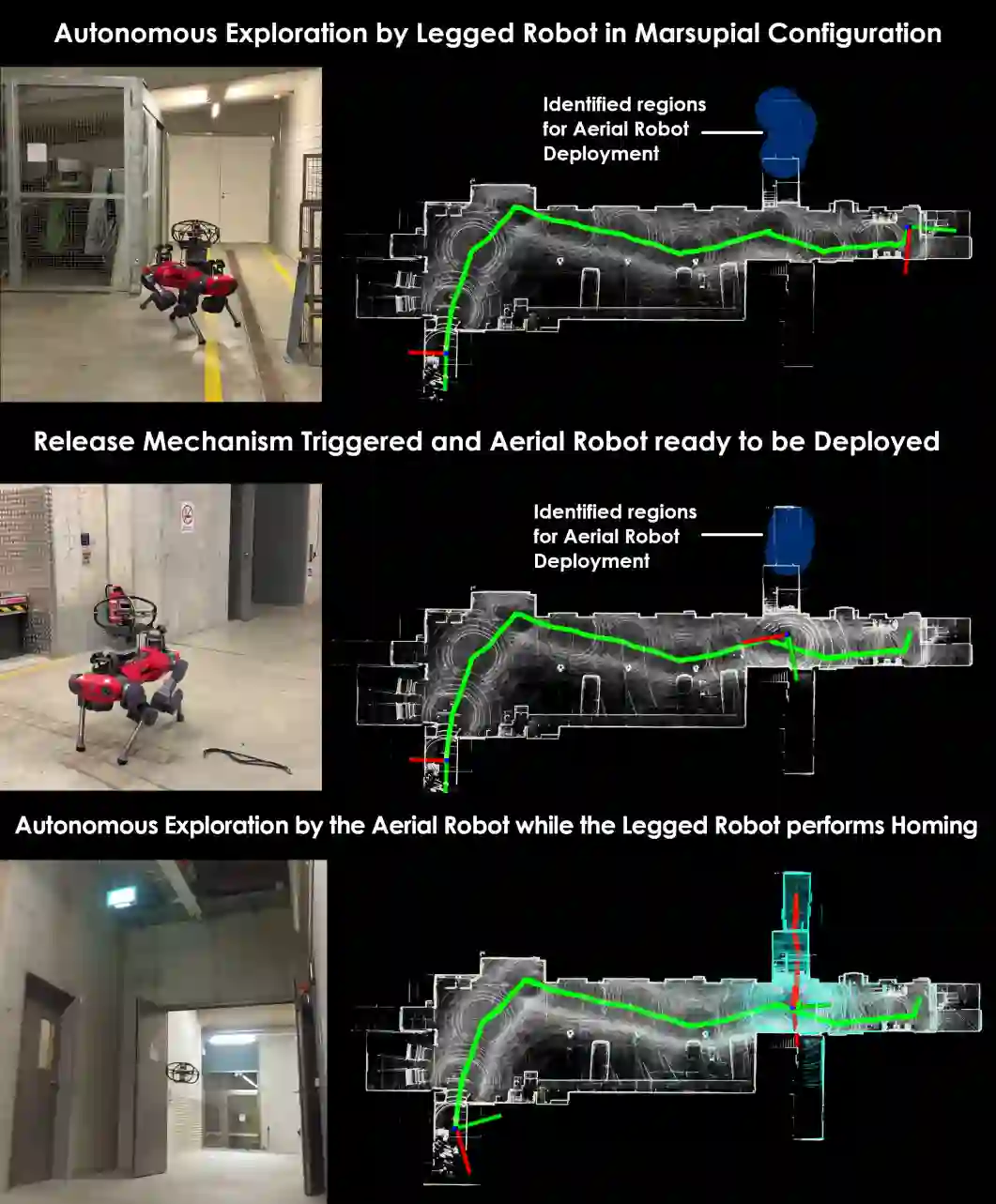
This work contributes a marsupial robotic system-of-systems involving a legged and an aerial robot capable of collaborative mapping and exploration path planning that exploits the heterogeneous properties of the two systems and the ability to selectively deploy the aerial system from the ground robot. Exploiting the dexterous locomotion capabilities and long endurance of quadruped robots, the marsupial combination can explore within large-scale and confined environments involving rough terrain. However, as certain types of terrain or vertical geometries can render any ground system unable to continue its exploration, the marsupial system can - when needed - deploy the flying robot which, by exploiting its 3D navigation capabilities, can undertake a focused exploration task within its endurance limitations. Focusing on autonomy, the two systems can co-localize and map together by sharing LiDAR-based maps and plan exploration paths individually, while a tailored graph search onboard the legged robot allows it to identify where and when the ferried aerial platform should be deployed. The system is verified within multiple experimental studies demonstrating the expanded exploration capabilities of the marsupial system-of-systems and facilitating the exploration of otherwise individually unreachable areas.
翻译:这项工作有助于形成一个涉及一条腿和一个能够合作测绘和探索路径规划的空中机器人的海洋机器人系统,利用两个系统的不同特性和从地面机器人有选择地部署航空系统的能力,开发三维导航能力,利用三维导航能力,利用三维导航能力,在其耐力限度内开展重点探索任务。以自主为焦点,两个系统可以共同定位和绘制地图,单独分享以利杜尔为基础的地图和计划勘探路径,同时在成型机器人上进行量身定做的图形搜索,使其能够确定在何种类型地形或垂直地貌上部署的地面系统无法继续勘探,因此,在必要情况下,可部署飞行机器人系统可以在多个实验性研究中进行核查,以显示马苏尔系统各自系统扩大的勘探能力,促进无法实现的单独勘探区域。