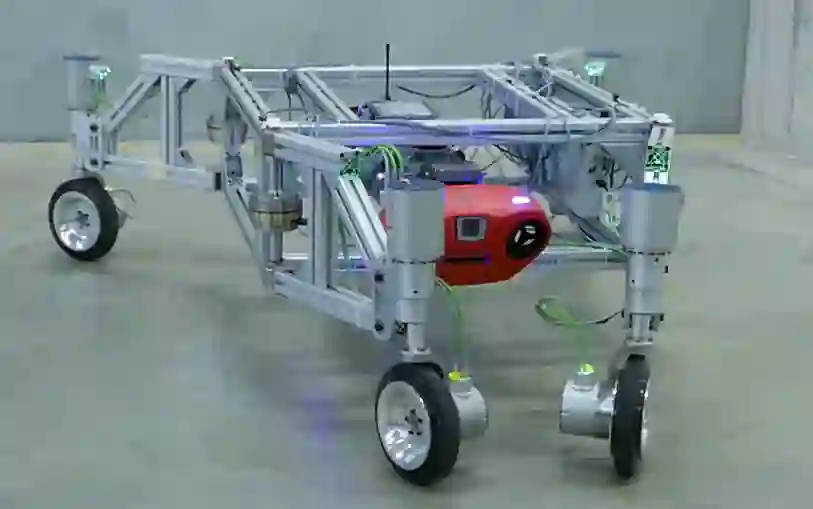
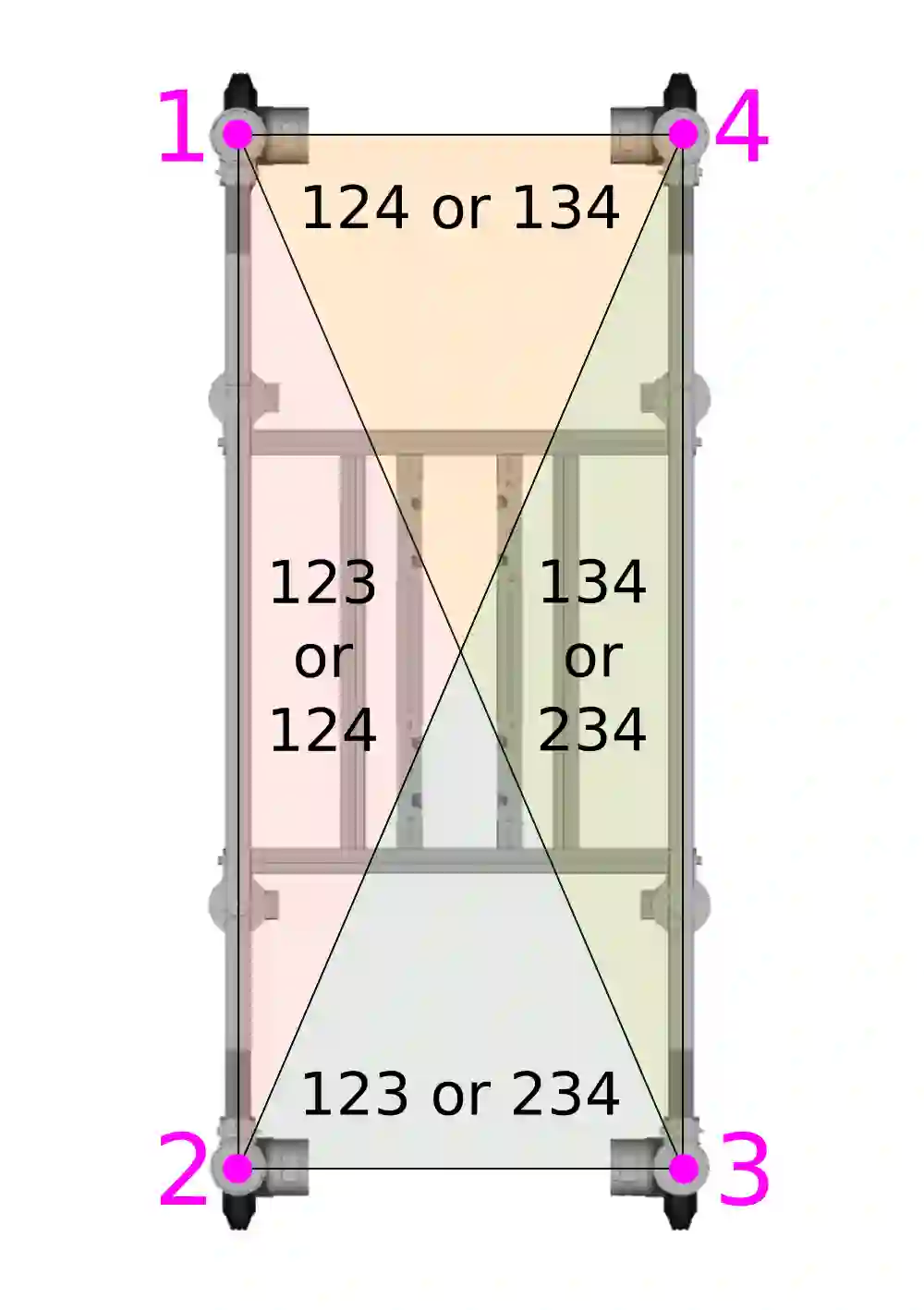
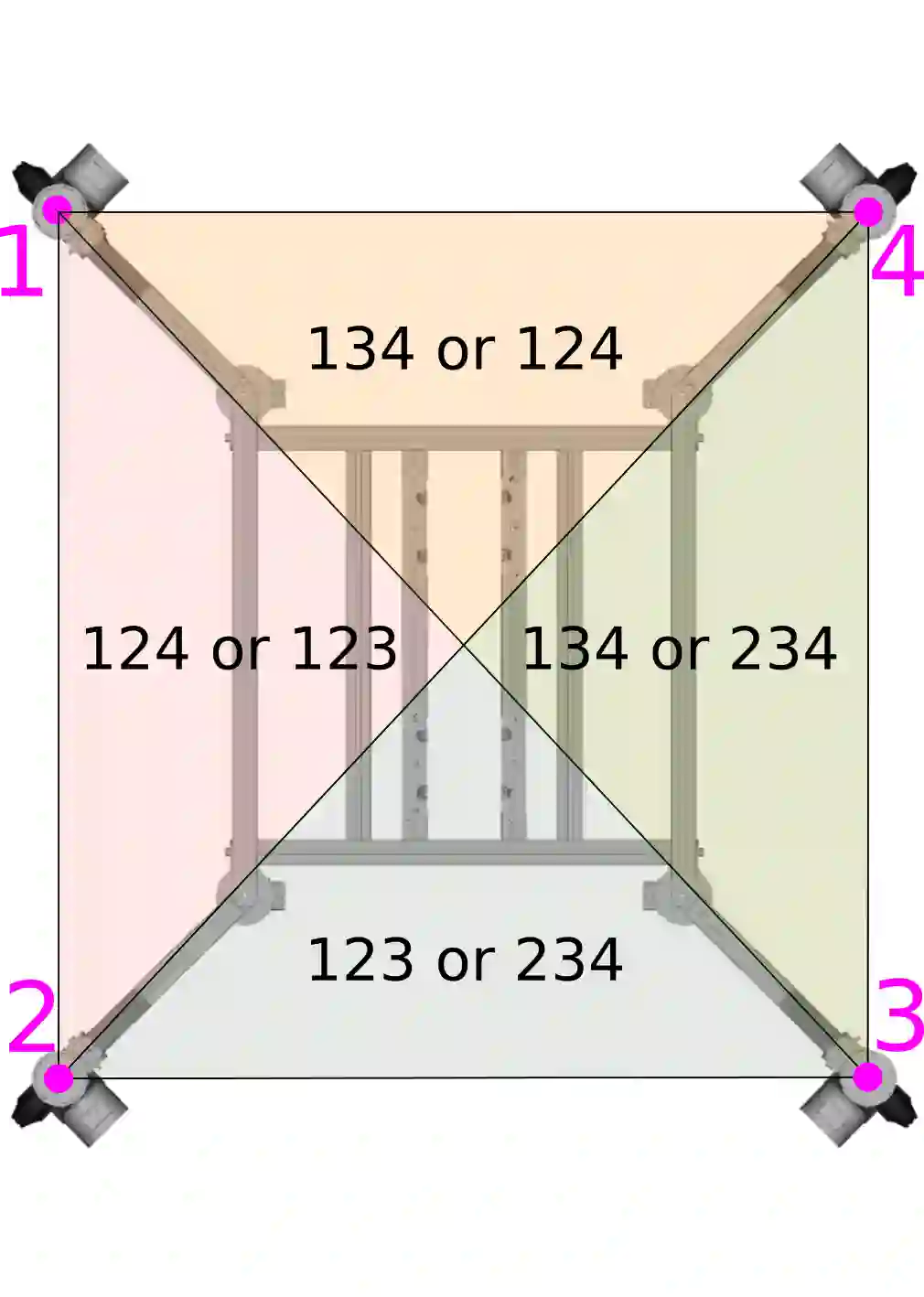
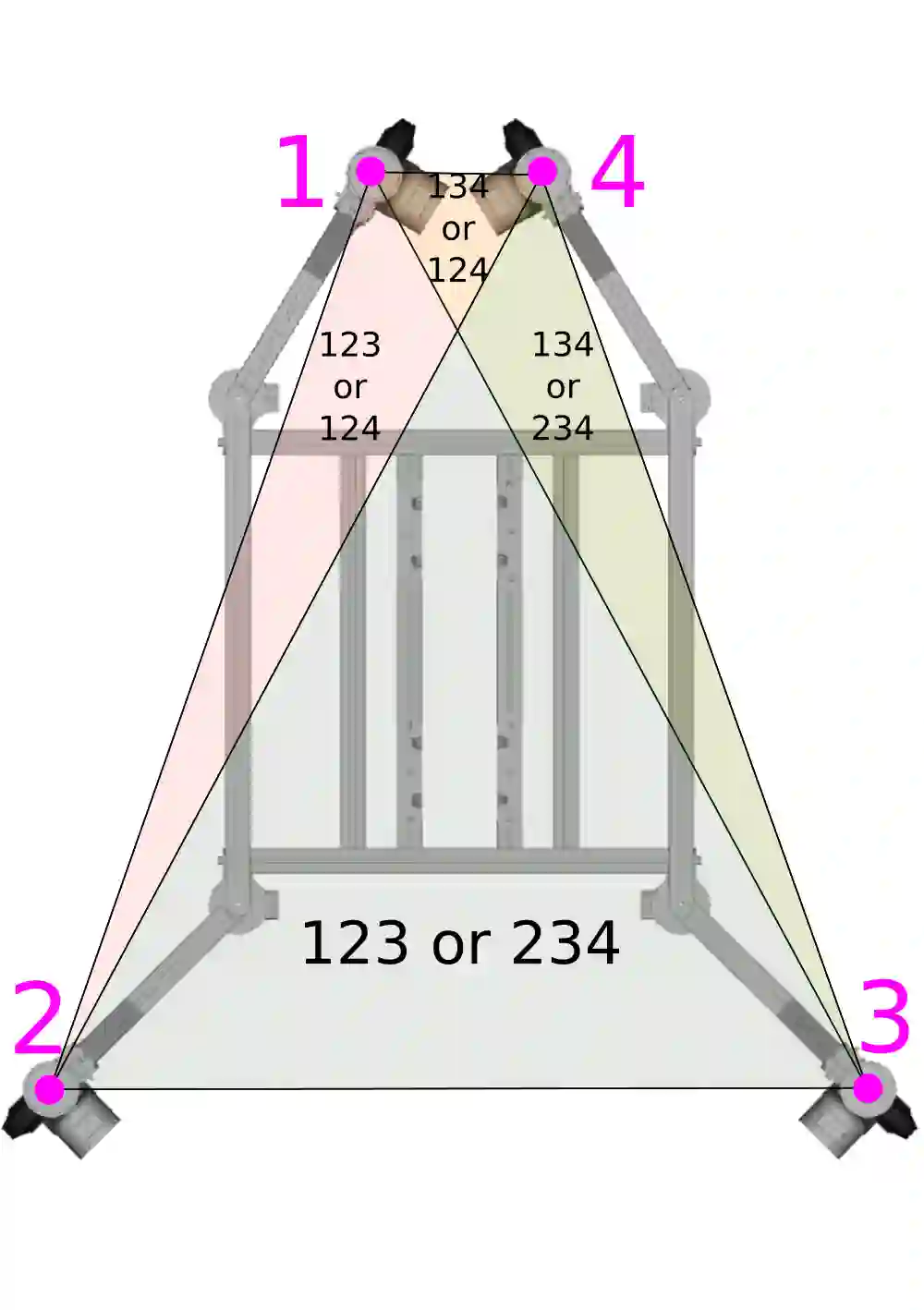
A robotic platform for mobile manipulation needs to satisfy two contradicting requirements for many real-world applications: A compact base is required to navigate through cluttered indoor environments, while the support needs to be large enough to prevent tumbling or tip over, especially during fast manipulation operations with heavy payloads or forceful interaction with the environment. This paper proposes a novel robot design that fulfills both requirements through a versatile footprint. It can reconfigure its footprint to a narrow configuration when navigating through tight spaces and to a wide stance when manipulating heavy objects. Furthermore, its triangular configuration allows for high-precision tasks on uneven ground by preventing support switches. A model predictive control strategy is presented that unifies planning and control for simultaneous navigation, reconfiguration, and manipulation. It converts task-space goals into whole-body motion plans for the new robot. The proposed design has been tested extensively with a hardware prototype. The footprint reconfiguration allows to almost completely remove manipulation-induced vibrations. The control strategy proves effective in both lab experiment and during a real-world construction task.
翻译:移动操纵的机器人平台需要满足许多现实世界应用的两个相互矛盾的要求: 需要有一个紧凑的基点来通过杂乱的室内环境导航,而支持需要足够大,以防止倒塌或倒塌,特别是在使用重载有效载荷或与环境进行强力互动的快速操作操作过程中。本文件提议了一种新颖的机器人设计,通过多功能足迹满足两种要求。它可以在通过紧凑的空间导航时将其足迹重新配置为狭窄的配置,在操纵重物体时则可以将其定位为宽阔的配置。此外,它的三角配置允许通过防止支持开关在不均匀的地面执行高精度任务。 模型预测控制战略将同步导航、重组和操作的规划和控制统一起来。 它将任务空间目标转换为新机器人的全机运动计划。 拟议的设计已经用硬件原型进行了广泛的测试。 足迹重组可以几乎完全消除操纵引起的振动。 控制战略在实验室实验和现实世界建设任务中都证明有效。