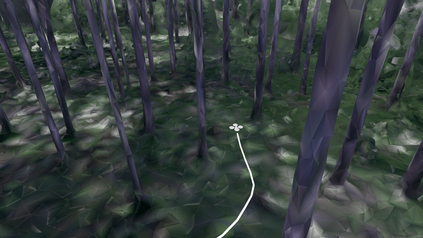
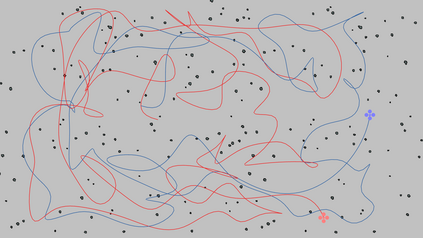
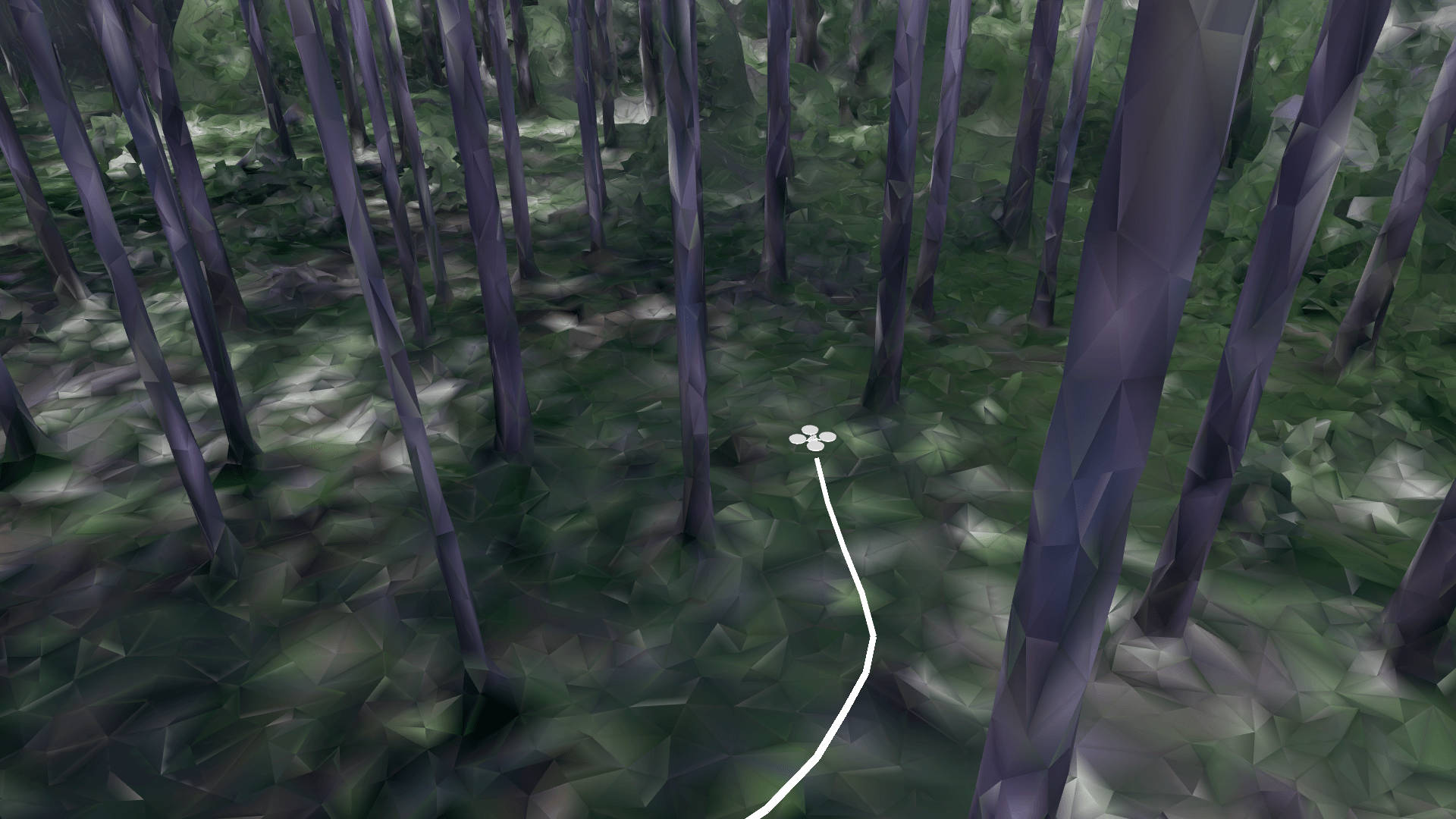
Efficient exploration strategies are vital in tasks such as search-and-rescue missions and disaster surveying. Unmanned Aerial Vehicles (UAVs) have become particularly popular in such applications, promising to cover large areas at high speeds. Moreover, with the increasing maturity of onboard UAV perception, research focus has been shifting toward higher-level reasoning for single- and multi-robot missions. However, autonomous navigation and exploration of previously unknown large spaces still constitutes an open challenge, especially when the environment is cluttered and exhibits large and frequent occlusions due to high obstacle density, as is the case of forests. Moreover, the problem of long-distance wireless communication in such scenes can become a limiting factor, especially when automating the navigation of a UAV swarm. In this spirit, this work proposes an exploration strategy that enables UAVs, both individually and in small swarms, to quickly explore complex scenes in a decentralized fashion. By providing the decision-making capabilities to each UAV to switch between different execution modes, the proposed strategy strikes a great balance between cautious exploration of yet completely unknown regions and more aggressive exploration of smaller areas of unknown space. This results in full coverage of forest areas of variable density, consistently faster than the state of the art. Demonstrating successful deployment with a single UAV as well as a swarm of up to three UAVs, this work sets out the basic principles for multi-root exploration of cluttered scenes, with up to 65% speed up in the single UAV case and 40% increase in explored area for the same mission time in multi-UAV setups.
翻译:在搜索和救援任务和灾害勘察等任务中,有效的勘探战略至关重要。无人驾驶航空飞行器(UAVs)在这些应用中特别受欢迎,有望以高速覆盖大片地区。此外,随着无人驾驶飞行器的感知日益成熟,研究重点已转向对单一和多机器人飞行任务的更高层次推理。然而,自主导航和探索先前未知的大空间仍是一个公开的挑战,特别是当环境四分五裂,以及由于森林等高阻力密度而出现大规模和频繁的隔离时。此外,在这种场景中,远程多线通信问题可能会成为一个限制因素,特别是当UAVS的感知日益成熟时,研究重点已转向对单方和小型温温室飞行任务进行更高层次的推理。通过向每个无人驾驶飞行器提供决策能力,使每个无人驾驶飞行器在不同执行模式之间发生转变,拟议战略在对尚未完全不为人所知的区域进行审慎的探索,以及多线通信的多路段通信问题可能会成为一个限制性因素。 这项工作提出了一种探索战略,在单一空间飞行区域进行持续快速的深度探索时段,这是在最先进的、最接近的、最接近的频率的面积的面积区域进行。