【泡泡图灵智库】PL-SLAM: 基于点线特征的实时单目VSLAM算法(ICRA)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:PL-SLAM: Real-Time Monocular Visual SLAM with Points and Lines
作者:Albert Pumarola, Alexander Vakhitov, Antonio Agudo, Alberto Sanfeliu, Francesc Moreno-Noguer
来源:ICRA2017
编译:汤文俊
审核:张国强
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——PL-SLAM: Real-Time Monocular Visual SLAM with Points and Lines:PL-SLAM: 基于点线特征的实时单目VSLAM算法,该文章发表于ICRA2017。
众所周知,对于依赖点特征的机器视觉算法,特别是VSLAM算法,弱纹理场景是致命要害之一。然而,在诸如城市、室内和所谓的“Manhattan worlds”等弱纹理场景中,结构化边缘线特征非常多,我们依然可以基于线特征进行实体估计。本文针对这种情况提出了一种解决方法。那就是,我们将基于点特征的ORB-SLAM算法进行扩展,使其可以融合线段特征。从而甚至在输入图片中点特征极其缺乏的情况下,我们提出的方法依然可以有效运行,并且,可以在连续三帧图像中只能检测到线特征的情况下进行初始化。我们基于TUM RGB-D数据集来评估该方法以及这种新的初始化策略。实验结果说明,线特征的应用不仅提升了ORB-SLAM算法在弱纹理环境中的性能,而且在不牺牲算法效率的情况下,系统性的提升了ORB-SLAM算法在联合点线特征的序列图像帧中的运行性能。
主要贡献
本文在ORB-SLAM算法的基础上提出了一种PL-SLAM算法,以适应弱纹理环境。
主要贡献有:
1. 在ORB-SLAM算法中,加入了线特征的应用,从而提升了其在弱纹理环境中的运行性能 ,得到了PL-SLAM算法。
2. 提出了一种新的初始化策略,即在连续三帧图像中只能检测到线特征的情况下,估计出一个近似的初始化地图。
算法流程
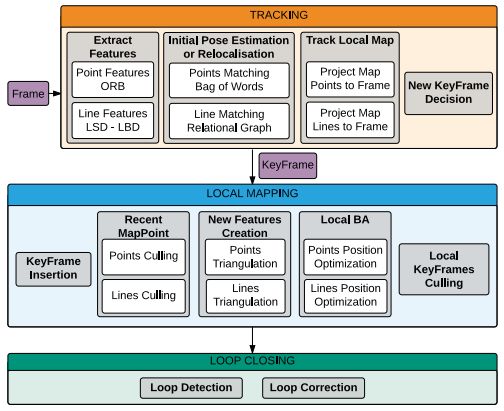
图1 PL-SLAM算法流程
如图1所示,PL-SLAM算法分为三个主要线程:跟踪、局部地图创建和回环检测。其中,跟踪线程对相机位姿进行估计,并决定何时添加新的关键帧。进而,局部地图创建线程将新的关键帧信息引入地图并运用BA对地图进行优化。回环检测线程则不断进行回环进行检测和修正。
在跟踪线程中,运用LSD算法对输入帧中的线段特征进行检测和提取,同时对点特征进行提取,进而运用相关图策略对线段特征成对地进行匹配。当图像帧中包含了足够多的环境信息后,将其作为一个关键帧。
在局部建图线程中,不能从至少三个视角被观测到或者在25%的关键帧中为不可见的线段,会被判定为异常值,从而被剔除。进而,对线段特征进行三角化,并融入局部地图中。最后运用局部BA方法对点线特征进行优化。
由于对整个地图中的线段特征进行匹配计算量太大,所以只利用点特征进行回环检测。
主要结果
我们基于TUM RGB-D数据集对PL-SLAM算法与其他VSLAM算法进行对比实验。同时,运用综合的实际数据对提出的初始化策略进行评估,并对PL-SLAM算法和ORB-SLAM算法的计算时间进行对比分析。所有的实验均执行5次并取平均值。该文章的补充资料可以查询网站http://www.albertpumarola.com/research/pl-slam/。
A.定位精度
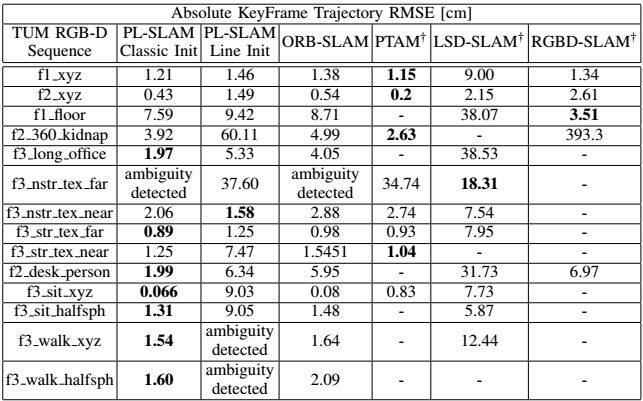
表1 基于TUM RGB-D数据集的定位精度
通过与ORB-SLAM算法、PTAM算法、LSD-SLAM算法、RGBD-SLAM算法进行对比实验,来评估PL-SLAM算法的定位精度,评估标准是绝对轨迹误差(ATE),结果如表1所示。可以看出,在所有的序列中,PL-SLAM算法均提升了ORB-SLAM算法的轨迹精度。PTAM、LSD-SLAM算法和RGBD-SLAM算法在极个别序列优于PL-SLAM算法,但是却在几个序列中失效了。
B.地图初始化——合成实验
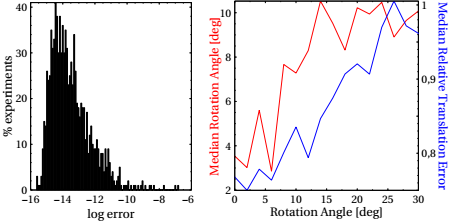
图2 地图初始化
我们创建多项式解算器并评估其稳定性,图2中左图展示了参数估计的分布误差,结果显示平均误差大多集中在1e-15附近,这说明我们的解算器是比较稳定的。此外,我们已经假设相机在连续三个帧之间的旋转运动是很小和连续的,图2中右图显示,旋转和平移误差会随着帧之间的旋转的增加而增大,并且当旋转估计误差在一定小的范围内,小旋转运动的假设对平移误差的影响是很剧烈的。但不管怎样,只要初始化地图被引入了BA优化器,则平移误差就会急剧下降。
C.地图初始化——实际数据实验
如表1所示,在基于TUM RGB-D数据集的实验中,由于小旋转运动的假设,线段地图的初始化失效了,但是在弱纹理序列f3 nstr tex far中,我们的方法能够得到初始化地图,优于其他方法。
D.计算时间

表2 跟踪和建图时间
如表2所示,PL-SLAM算法通过引入线特征提升了ORB-SLAM算法的精度,但是也增大了计算复杂度。可以看到,map features creation和local BA花费了最多的时间。但是不管怎样,PL-SLAM算法最终的帧速率接近一般PC的实时帧速率,即20fps。

Abstract
Low textured scenes are well known to be one of the main Achilles heels of geometric computer vision algorithms relying on point correspondences, and in particular for visual SLAM. Yet, there are many environments in which, despite being low textured, one can still reliably estimate line-based geometric primitives, for instance in city and indoor scenes, or in the so-called “Manhattan worlds”, where structured edges are predominant. In this paper we propose a solution to handle these situations. Specifically, we build upon ORBSLAM, presumably the current state-of-the-art solution both in terms of accuracy as efficiency, and extend its formulation to simultaneously handle both point and line correspondences. We propose a solution that can even work when most of the points are vanished out from the input images, and, interestingly it can be initialized from solely the detection of line correspondences in three consecutive frames. We thoroughly evaluate our approach and the new initialization strategy on the TUM RGB-D benchmark and demonstrate that the use of lines does not only improve the performance of the original ORB-SLAM solution in poorly textured frames, but also systematically improves it in sequence frames combining points and lines, without compromising the efficiency.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



