©作者 | 曾逸飞
学校 | 西安电子科技大学
研究方向 | 姿态估计与捕捉
问题来源
在 2D 姿态识别领域,基于高斯热图的方法自 2014 年提出以来,向来是独领风骚,霸占了各大榜单整整七年之久。在此期间,甚至逼得回归方法另立门派,单独建立了基于 regression 的性能榜单,可见两个方法之间的性能差异之大。
然而,对于高斯热图所拥有的优势何在,却向来是众说纷纭,缺少一个统一的答案。其中比较令人信服的理由有以下几个方面:
优势1: 全卷积的结构能够完整地保留位置信息,因此高斯热图的空间泛化能力 更强。而回归方法因为最后需要将图片向量展开成一个长长的一维向量 ,reshape 过程中会对位置信息有所丢失。除此之外,全联接网络需要将位置信息转化为坐标值,对于这种隐晦的信息转化过程,其非线性是极强的,因此不好训练和收敛。
优势2: 关节点之间存在相互联系 。以脖子和肩膀为例,这两个地方常常会挨得比较近,因此空间上是存在相关性 的。高斯热图可以在一张图中保留这种相关性,因此已知脖子的位置可以帮助估计肩膀,而已知肩膀的位置也能帮助估计脖子。但是,回归坐标时是对 k 个坐标点分别回归的,没办法照顾到这种关节间的相关性。
优势3: 高斯热图有点类似分类问题中的软标注 。它在目标位置上加上了一个渐进的分布过程,这能帮助网络更平滑地找到梯度下降的过程。同时软标注也减轻了在标注有误情况下的过拟合 情况。(软标注的提出和作用具体可以看 Szegedy 的这篇
[1]
经典文章)
然而,最近 RLE
[2]
(残差似然估计)用回归 的策略重回 SOTA 巅峰,做到和 HRNet 几乎持平,这就不由得令人对上述的理由进行了重新的思考。
还没有读过 RLE 的文章可以简单读一下我这篇零基础的核心思路讲解,熟悉一下 RLE 文章的概况,不然下面牵涉到相关知识可能会读起来比较困难:
https://zhuanlan.zhihu.com/p/440567782
RLE和热图的共同优势
数据集对关节的标注点是不能做到完美的。因此当标注值和真实的关节值存在偏差
时,RLE 学习这个偏差
的概率密度函数
。然后设计似然函数
,作为损失函数训练回归网络。为了更好的收敛,RLE 模仿残差块(Residual Block)学习残差的思想,去学习偏差密度函数
较之于简单分布的残差
或者
,以期学习分布的过程更快更好地收敛。
如果你第一次看到 RLE,对这段话存在很多问号的话,这是也正常的。这个时候还是推荐去读读论文,或者读读上面提到的文章,以对这段话想表达的意思多做熟悉。如果你可以很清楚的明白其核心思想,那我们不妨开始思考:
RLE的这个过程,做到了高斯热图三点优势中的哪个(哪些)优势呢?
优势1 :高斯热图空间泛化性强,而回归策略会丢失空间信息 。——RLE 仍然是用的回归,在 reshape 过程中仍然会丢失空间信息,但它依然可以做到和热图方法平分秋色。所以这条优势可能不是那么重要。
优势2: 高斯热图能在一张图中捕捉关节间的相关性,回归的过程则缺少关节间相关性的捕捉。 ——RLE 仍然没有显式地捕捉这种关节间的关系,但这不影响它是热图方法旗鼓相当的对手。所以这条优势可能也不是那么重要。
优势3: 高斯热图相当于一种软标注,它鼓励了一种渐进平滑的回归过程,也能减少对噪声数据的过拟合,而直接回归则没有这样的过程 。——RLE就恰恰是在回归完成后,通过去学习标注和预测间的
差值分布
,从而建立起损失函数,以帮助回归的。同时,因为学习的是标注的误差情况 ,RLE 把你标注过程中出现的问题的规律都找出来了,也很自然能减少对那些标注不好的数据的过拟合。不难发现,RLE 和热图方法存在的一个很显著的共性就是:二者都强调了坐标的周围分布 , 也都减轻了对标注的过拟合 情况。
从上面的逐条比对中,我们不难发现,两个方法的重要共性就是坐标周围的分布情况。RLE 也好,热图也好,都是在这个分布上做了一些文章。热图显式地将这个分布标注出来,作为学习目标。而 RLE 则相对不那么直接地利用学习到的分布,用它建立了损失函数,来帮助网络更好的回归。
分布很重要,然后呢?
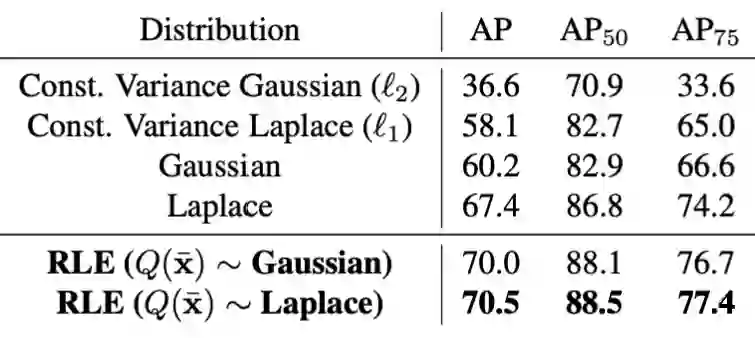
现在我们意识到,对于 2D 姿态识别而言,关节点周围的分布是一件重要的事情。RLE 在行文和实验中,也多次强调了这一点。下面是在不同分布情况下训练 resnet 得到的不同的效果,其中的差异可谓是巨大:
不同假设条件下的分布作为受控的变量,RLE 组织了一系列对比实验。从恒方差的高斯/拉普拉斯分布,到变方差的高斯/拉普拉斯分布,最后再到不同初始分布下的 RLE 学习到的分布,同一个 backbone 下性能差异可谓云泥之别。普遍而言,拉普拉斯分布更加符合关节标注的稀疏特性 ,因此往往可以取得更好的效果。但随着分布的灵活度 和可变性 的增加,二者的差距也在不断的减少。由于 RLE 采用的 flow 方法对分布具有非常出色的学习能力,因此最后两种分布的差异已经减少到只剩 0.5%mAP 了。
那么现在我们既然知道了分布的形式很重要,总得利用这个性质来做点什么吧?考虑到传统的热图是采用的分布是高斯分布,一个朴素且自然的想法就是:
将热图中的高斯分布改成拉普拉斯分布,再去训练网络。这不就让训练过程更符合数据特征了吗?
于是我就在 SimpleBaseline 的基础上改了两行:
# Copyright (c) Microsoft # Licensed under the MIT License. # Written by Bin Xiao (Bin.Xiao@microsoft.com) # 文件名:JointDataset.py # line:211左右 #原高斯分布代码: #g = np.exp(- ((x - x0) ** 2 + (y - y0) ** 2) / (2 * self.sigma ** 2)) #改成拉普拉斯分布: from scipy.special import kn1 /np.pi*kn(0 ,np.sqrt(2 *((x-x0)**2 +(y-y0)**2 ))/ (2 * self.sigma ** 2 ))1 ]=1
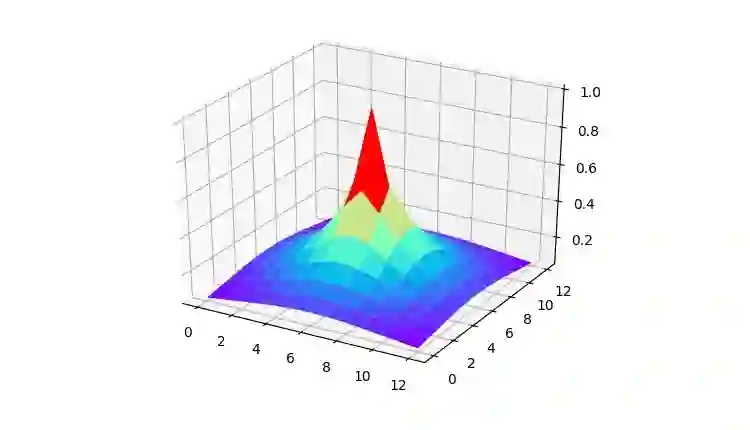
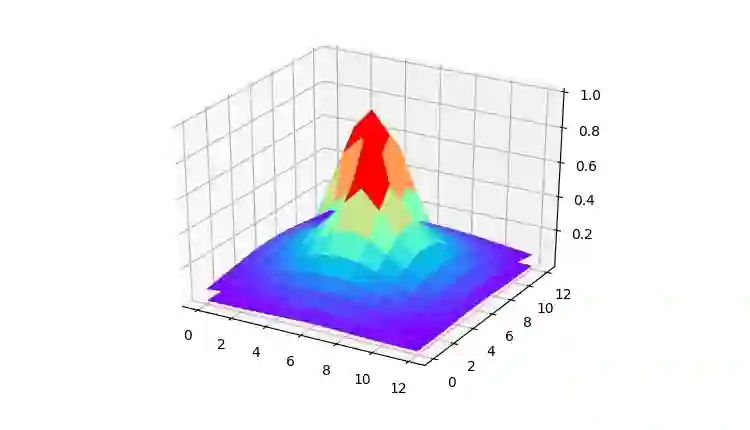
▲ 图中的分布有两层,上面较宽的是高斯,上面被包含住的是拉普拉斯,拉普拉斯从高斯一半的地方切出来了
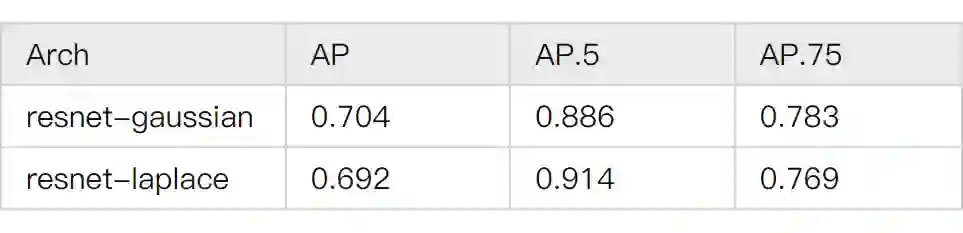
直觉上讲,用了更符合数据特征的拉普拉斯分布,效果理应更好才对。于是我在 Colab 上训练了四天两夜,含辛茹苦地呵护电脑的网络环境,终于跑完了 150 个 epoch 的 resnet50,效果却恰恰相反 (模型链接在这里
[3]
)。用这种策略训练出来的模型,除了 AP.5 以外,均不如高斯分布下的热图 。
即使是将损失函数换成更契合分布形式的 l1 loss 也没有让情况更加好转。更换损失函数后,训练出来的模型也只是堪堪接近 0.69mAP。这不由得让人纳闷:
为什么对回归方法而言的灵丹妙药,到了热图方法上就不见成效了呢?
即使二者都是在网络架构的最后模块利用了“分布”这一工具,但它们在利用过程中采取的“先验假设”不同,这也决定了它们对分布的利用方式存在“根本性”的不一致。
RLE和热图使用分布时的核心差异
要想明白高斯热图和RLE的核心差异,以及探索它们潜在的先验的不同,我们至少要从其工作流程入手吧。那好,我们先来看高斯热图的工作流程:
看完高斯热图的先验假设,我们再来看看 RLE 运作中秉持的思路是什么:
RLE 的先验假设:每一个人工标注的点
看下来两个策略的先验假设,你觉得哪个更加有道理呢?第二个显然要中肯不少。事实上,标注的偏差在其他 cv 领域中应该也存在,但在 2D 姿态识别中,面对每一个关节都要做到像素级别的正确标注 ,这个难度其实是相当大的。图像分割领域可能也会有像素上标注偏差,但这种偏差一般存在在物体的边界处。除去一些小物体外,roi 的得分大头应该还是在边界的内部,所以问题可能还没那么明显。但对于姿态识别,关节标注的误差分布问题则应该成为我们考虑的对象。
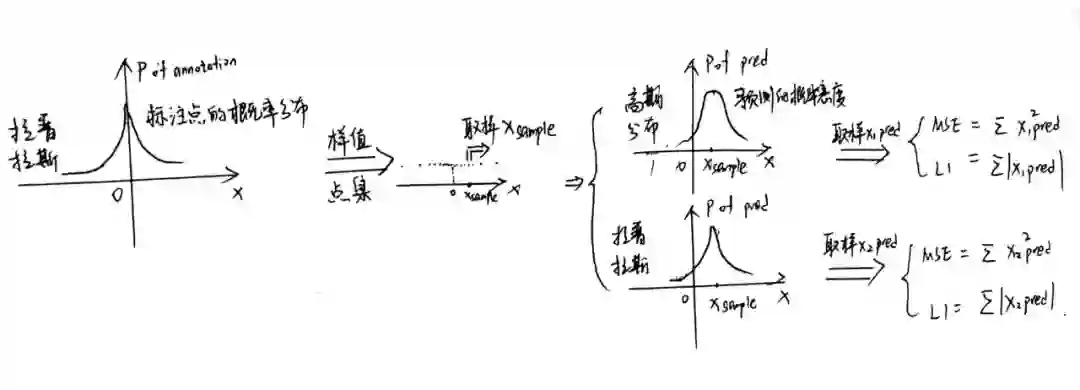
在此原则上,我们能不能通过一个简单的实验,从而给出第二部分中的拉普拉斯热图性能不升反降 的解释呢?这是可以的做到的。这个实验只要用蒙特卡罗法模拟标记-预测的过程 就好了。
我们先假设存在一个真正的关节点
,不失一般性把它设成原点
。
最后我们重复进行大量的仿真,从而计算高斯和拉普拉斯两种分布下,预测点
相对于
的均方误差或者 l1 误差。
import numpy as np#初始化高斯热图的总mse误差 #初始化拉普拉斯热图的总mse误差 #初始化高斯热图的总l1误差 #初始化拉普拉斯热图的总l1误差 #第一次采样,取出(x_sample) #第二次高斯采样,取出(x_pred1) #第二次拉普拉斯采样,取出(x_pred2) #loss累加 #误差的累加除以迭代总次数
可以看出,在标注存在拉普拉斯形式的误差时 ,并不应该给标注点设置拉普拉斯热图。因为这种情况下,拉普拉斯热图的误差 其实要大于 高斯热图,因此采用高斯热图才是实际上更好的选择。这也就解释了第二部分中,采取拉普拉斯热图后效果不升反降的原因了。
定性一点来讲 ,其实这是因为拉普拉斯分布的预测比高斯分布更加自信 。但在标注本身存在误差的情况下,这种自信反而对预测真实值不利。倒是温和一些的高斯分布,在对标注的错误不知情的情况下,平均预测出的结果离真实值更近。
核心差异可以解释的其他现象
其实在明白二者存在先验假设 上的核心差异之前,我还曾经对 RLE 中的一个实验结果的疑问久久不能释怀。
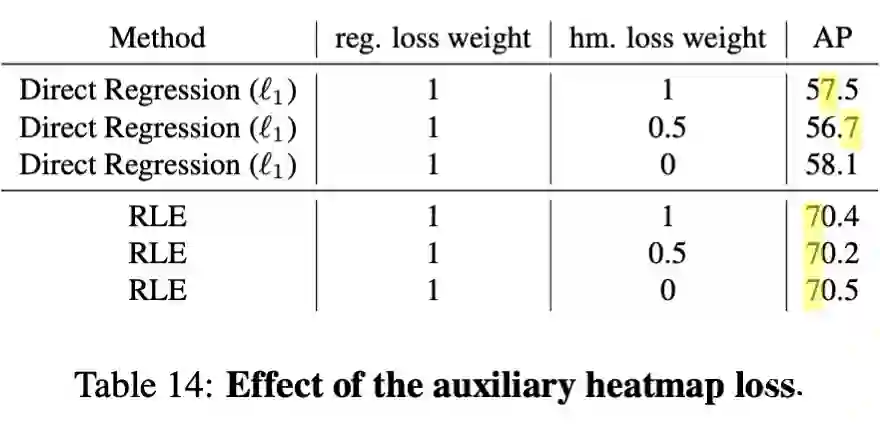
▲ heatmap+regression的混合性能测试
简单来讲,这组实验是在回归的网络之外,又额外接了几个 deconv 层生成 heatmap。然后将这个 heatmap 生成的 loss 以一定比例加到 regression 的 loss 中。最后根据加权后的 loss 对网络的参数进行训练。然而,这么做不但没有让模型效果变好,反而使模型的效果下降。
这个时候很容易想到的解释是,heatmap loss 的效果很差,所以污染了 regression loss 的效果。但这个时候,实验中最难以解释的事情发生了:随着 heatmap loss 的增大,得到的 AP 先降再升 ,呈现出U型的曲线。如果模型性能的下降单纯是因为 heatmap 效果差,那其实可以预见的是 AP 随着 heatmap loss 的增大单调下降 。但是事实和这个相反,这就很让人困惑:
一来,集成损失函数得到的效果非但没有变好,反而是变差了。二来,这又不是因为集成进来的部分本身质量差。
但当我认识到二者深层的矛盾性后,其实这两点奇怪现象的原因也就不言自明了。
形象一点讲的话,heatmap loss 和 RLE loss 本身就像是两根朝着不同方向拉的绳子。当只有一条绳子作用时效果最好,当加入了另一者后效果会下降,降到二者旗鼓相当时迎来效果的最低点。再往后的话,如果提高加入者的权重,效果就会回暖,也就是说这个时候绳子朝着加入者的方向偏去了,所以打破了平衡拉扯时的最低点。
总结
首先通过目前两大 SOTA 方法的优势对比,筛选出了对于 2D 姿态估计较为重要的事物: 坐标点周围的分布。通过利用这种分布,我们既可以做到帮助网络平滑收敛,也能减少过拟合。
然后根据 RLE 中 laplace 分布的较好表现提出了朴素的猜想:是否将拉普拉斯分布应用到热图上后,模型也可以得到更好的表现呢?然而,实验却给出了否定的回答。
通过探索热图和 RLE 对于标注假设的不同,用简单的实验解释了上述现象。并得到了二者的核心差异所在:虽然都是利用坐标周围的分布训练模型,但热图假定标注是正确无疑的,RLE 则假定标注没法尽善尽美,而是和真实值之间存在偏移。
最后利用上述猜想,回答了一个令人困扰的疑问:为什么组合后的 loss 其效果呈现出独特的 U 型分布。
[1] https://www.cv-foundation.org/openaccess/content_cvpr_2016/papers/Szegedy_Rethinking_the_Inception_CVPR_2016_paper.pdf
[2] https://arxiv.org/abs/2107.11291
[3] https://drive.google.com/file/d/1--fJjwS9V_YljuUaLdRvVZk4CCR-RJt_/view?usp=sharing
感谢 TCCI 天桥脑科学研究院对于 PaperWeekly 的支持。TCCI 关注大脑探知、大脑功能和大脑健康。
如何才能让更多的优质内容以更短路径到达读者群体,缩短读者寻找优质内容的成本呢?答案就是:你不认识的人。
总有一些你不认识的人,知道你想知道的东西。PaperWeekly 或许可以成为一座桥梁,促使不同背景、不同方向的学者和学术灵感相互碰撞,迸发出更多的可能性。
PaperWeekly 鼓励高校实验室或个人,在我们的平台上分享各类优质内容,可以是最新论文解读 ,也可以是学术热点剖析 、科研心得 或竞赛经验讲解 等。我们的目的只有一个,让知识真正流动起来。
📝 稿件基本要求:
• 文章确系个人原创作品 ,未曾在公开渠道发表,如为其他平台已发表或待发表的文章,请明确标注
• 稿件建议以 markdown 格式撰写,文中配图以附件形式发送,要求图片清晰,无版权问题
• PaperWeekly 尊重原作者署名权,并将为每篇被采纳的原创首发稿件,提供业内具有竞争力稿酬 ,具体依据文章阅读量和文章质量阶梯制结算
📬 投稿通道:
• 投稿邮箱: hr@paperweekly.site
• 来稿请备注即时联系方式(微信),以便我们在稿件选用的第一时间联系作者
• 您也可以直接添加小编微信(pwbot02 )快速投稿,备注:姓名-投稿
△长按添加PaperWeekly小编
🔍
现在,在「知乎」 也能找到我们了
进入知乎首页搜索「PaperWeekly」
点击「关注」 订阅我们的专栏吧