【泡泡一分钟】基于光场立体匹配的鲁棒伪随机场(ICCV2017-2)
每天一分钟,带你读遍机器人顶级会议文章
标题:Robust Pseudo Random Fields for Light-Field Stereo Matching
作者:Chao-Tsung Huang
来源:International Conference on Computer Vision (ICCV 2017)
播音员:小晨
编译:陈世浪 周平
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

马尔科夫随机场被广泛用于模拟光场立体匹配问题。然而,大多数以前的方法使用固定参数,并且不适应光场统计。相反,他们探索明确的视觉线索以提供局部适应性,从而提高深度质量。但是这些额外的假设可能最终限制它们的适用性,例如为密集光场设计的算法不适用于稀疏光场。
本文建立了一种基于经验的贝叶斯框架鲁棒伪随机场,研究了广义适用性的内在统计线索。在伪似然的基础上,应用软期望-最大化(expectation-maximization)对良好的模型拟合和硬期望-最大化(expectation-aximization)进行鲁棒深度估计。我们引入了新的像素差分模型,使之能够同时实现这种适应性和鲁棒性。我们还设计了一个算法来在密集、稀疏甚至去噪的光场上使用这个框架。
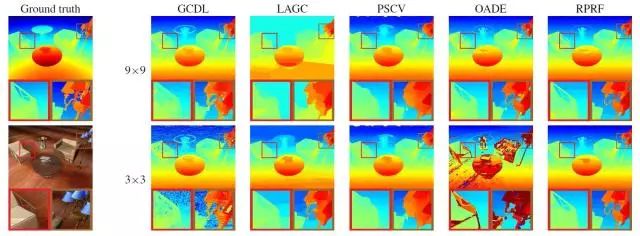
客厅的深度地图估计
实验结果表明,该算法鲁棒性强,收敛速度快。在深度精度和计算速度方面,它也优于目前最先进的算法。

Abstract
Markov Random Fields are widely used to model lightfield stereo matching problems. However, most previous approaches used fixed parameters and did not adapt to lightfield statistics. Instead, they explored explicit vision cues to provide local adaptability and thus enhanced depth quality.But such additional assumptions could end up confining their applicability, e.g. algorithms designed for dense light fields are not suitable for sparse ones.
In this paper, we develop an empirical Bayesian framework—Robust Pseudo Random Field—to explore intrinsic statistical cues for broad applicability. Based on pseudo-likelihood, it applies soft expectation-maximization(EM) for good model fitting and hard EM for robust depth estimation. We introduce novel pixel difference models to enable such adaptability and robustness simultaneously.We also devise an algorithm to employ this framework on dense, sparse, and even denoised light fields.
Experimental results show that it estimates scene-dependent parameters robustly and converges quickly. In terms of depth accuracy and computation speed, it also outperforms state-of-the-art algorithms constantly.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘链接:https://pan.baidu.com/s/1nwlsaUl 密码:wfmn
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com

