学界 | UIUC & Zillow提出LayoutNet:从单个RGB图像中重建3D房间布局
选自arXiv
作者:Chuhang Zou等
机器之心编译
参与:Geek Ai、路
近日,来自 UIUC 和 Zillow 的研究者在 arXiv 上发布论文,提出 LayoutNet——一种仅通过单张透视图或全景图就能估算室内场景 3D 布局的深度卷积神经网络(CNN)。该方法在全景图上的运行速度和预测精度比较好,在透视图上的性能是最好的方案之一。该方法也能够推广到非长方体的曼哈顿布局中。目前,该论文已经被 CVPR 2018 接收。
引言
对于机器人和虚拟现实、增强现实这样的应用来说,从图像中估算出房间的三维布局是一个重要的任务。房间的布局指墙壁相对于相机中心的位置、方向以及高度。布局可以表示为一组经过投影处理的角落位置或边界,或者表示为一个 3D 网格。现有的研究被应用于一些特定的问题,例如通过透视图或全景图预测长方体形状的室内布局。
本论文提出了 LayoutNet,它是一个仅通过单张透视图或全景图(如图 1 所示)就能估算室内场景 3D 布局的深度卷积神经网络(CNN)。该方法在全景图上的运行速度和预测精度比较好,在透视图上的性能是最好的方案之一。该方法也能够推广到非长方体的曼哈顿布局中,例如「L」形的房间。
代码地址:https://github.com/zouchuhang/ LayoutNet

图 1. LayoutNet 根据单张等距柱状投影的全景图预测一个非长方体房间的布局。
LayoutNet 方法的工作流程包含三个步骤(如图 2 所示)。首先,系统分析消失点,并且将图像与地面对齐在一条水平线上(见 Sec. 3.1)。这种对齐方式确保了墙与墙的边界是垂直的线,根据实验结果,该操作大大降低了误差。第二步,使用一个带有编码器-解码器结构和跳跃连接的卷积神经网络直接预测图像上的角(布局中的连接处)和边界的概率图。每个角落和边界都提供了房间布局的完整表示。研究者发现,在单个网络中一起预测它们将得到更好的估计结果。最终,研究者对三维布局参数进行了优化,用于拟合预测出的角落和边界(见 Sec. 3.4)。最后三维布局优化过程的损失很难在网络中进行反向传播,但是训练过程中对 3D 参数执行的直接回归(direct regression)起到了有效的替代作用,这最大化提升了最终预测的准确度。
本文的突出贡献有:
提出了一种更加通用的根据 RGB 图像推断出布局的算法,它适用于曼哈顿布局的透视图和全景图。该系统在全景图像上有较好的运行速度和预测准确度,在透视图图像上取得了第二优的综合预测性能和最优的运算速度。
展示了利用预先计算出的消失点线索、几何约束以及后处理优化的好处,说明深度神经网络方法仍然能够从几何线索和约束中受益。研究者还展示了添加目标函数以直接回归 3D 布局参数,从而更好地预测用于最终解决布局预测问题的边界和角落。
扩展了斯坦福「2D-3D」数据集的注释 [1],提供了可用于后续工作的房间布局注释。
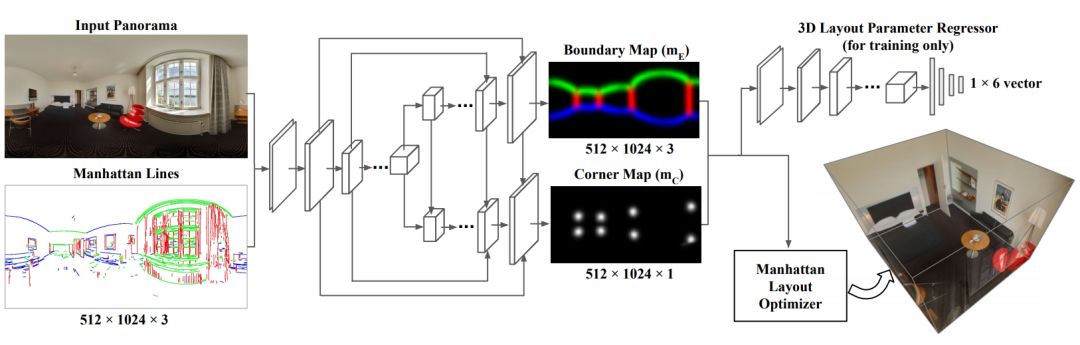
图 2. 概述。LayoutNet 遵循编码器-解码器策略。网络的输入是单张 RGB 全景图和曼哈顿线图的级联。该网络将一同预测布局的边界和角落的位置。3D 布局参数损失使得预测准确率最大化提升。最终的预测结果是一个曼哈顿约束下的布局重建。
网络架构
LayoutNet 网络架构如图 2 所示。该网络遵循编码器-解码器策略。深度全景编码器:输入为一个 6 通道的特征映射,即使用 Sec. 3.1 中提到的对齐方法将分辨率为 512*1024 的单个 RGB 全景图(或者分辨率为 512*512 的透视图)和三个正交消失方向上的曼哈顿线图的特征映射级联起来。编码器包含 7 个卷积层,卷积核的大小为 3*3。每个卷积之后会跟随一个 ReLU 操作和最大池化层,其下采样因子为 2。第一个卷积层有 32 个特征,研究者在每次卷积操作之后将特征规模扩大到之前的两倍。这个深度神经网络结构确保从高分辨率图像中学习到更好的特征,有助于简化解码步骤。研究者尝试在每一个卷积层之后进行批量归一化操作,但是发现这样做预测准确率降低。研究者还探索了另一种网络结构,单独将一个编码器应用于输入图像和曼哈顿线图上,但它与研究者目前使用的简单设计相比,性能没有得到提升。
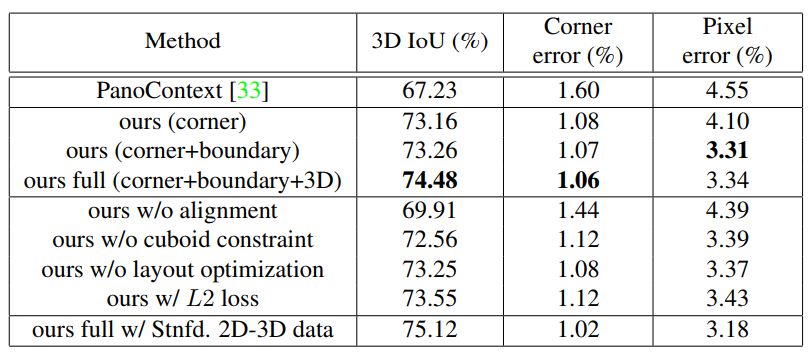
表 1. 使用 PanoContext 数据集 [33] 从全景图中得到的长方体布局量化预测结果。研究者比较了 PanoContext 方法,并且在本文提出方法的各种配置参数上引入了模型简化分析。粗体数字表示训练 PanoContext 数据时得到的最佳性能。
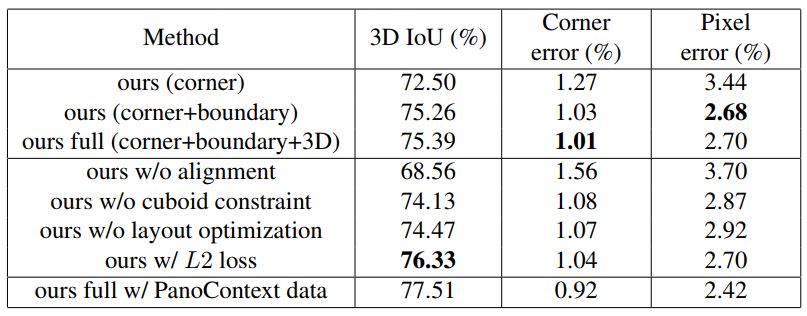
表 3. 在研究者标注的斯坦福 2D-3D 注释数据集上的模型评估结果。研究者通过对各种变量的模型简化分析评估了 LayoutNet 方法。粗体数字表示仅仅在斯坦福 2D-3D 训练数据集上的最佳训练结果。
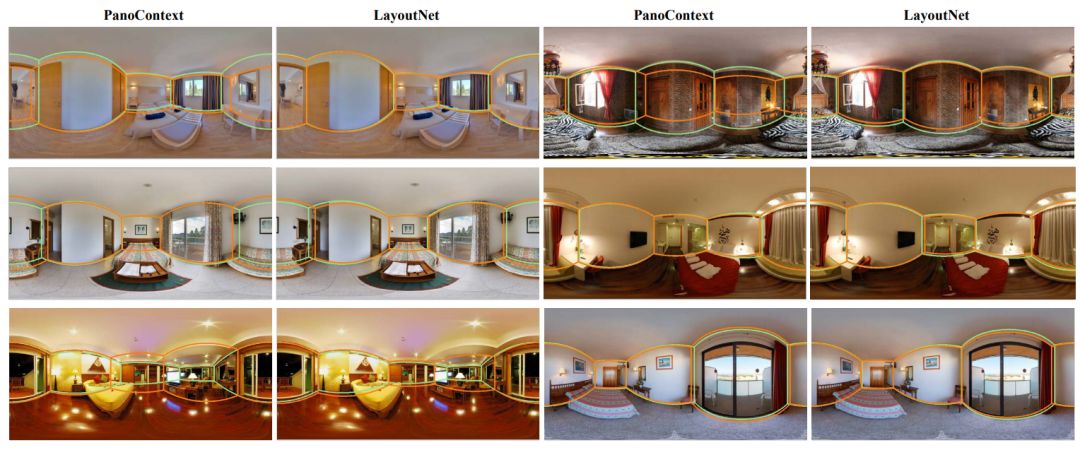
图 3. 在 PanoContext 数据集 [33] 上对长方体布局预测的定性分析结果(随机抽样)。研究者展示了其方法(偶数列)和当前最优方法 [33](奇数列)的性能。每个图像由给定计算方法预测出的布局(橙色的线)和标定的真实布局(绿色的线)组成。本文方法在像素层面上是十分准确的,但是正如定量分析结果中交并比(IoU)这一测度所显示的那样,三维布局预测对即使是很小的二维预测误差都很敏感。
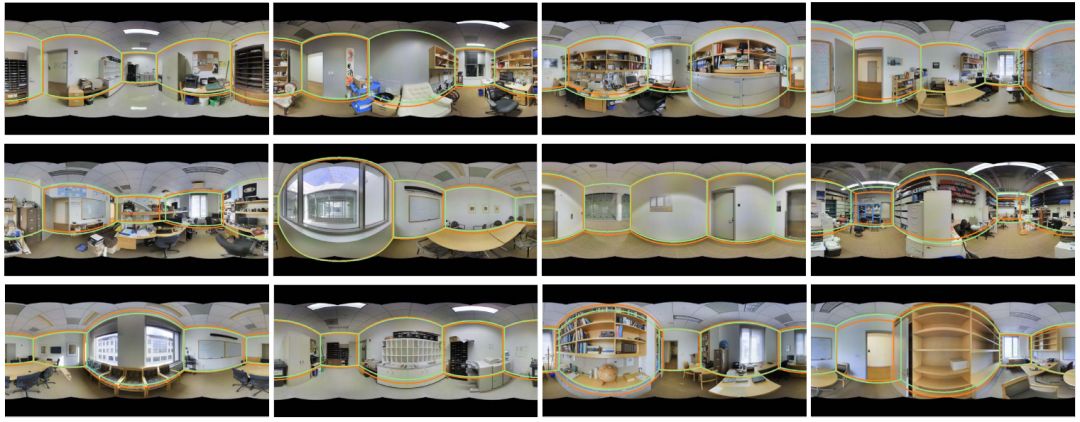
图 4. 在斯坦福 2D-3D 注释数据集上对长方体布局预测的定性分析结果(随机抽样)。与 PanoContext 数据集相比,这个数据集更加棘手,因为它垂直方向的视场更小,而且更加闭塞。研究者展示了其方法预测出的布局(橙色的线),并将其与真实的布局(绿色的线)进行了对比。
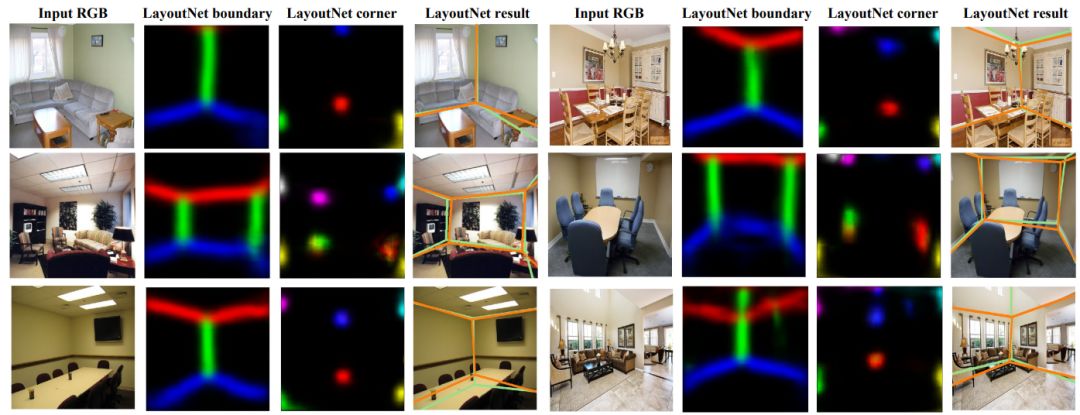
图 5. 对透视图的定性分析结果。研究者展示了输入的 RGB 图像,预测了边界/角落图以及最终估算出来的分布(橙色的线),并将其与真实的布局(绿色的线)进行了对比。
论文:LayoutNet: Reconstructing the 3D Room Layout from a Single RGB Image
论文链接: https://arxiv.org/abs/1803.08999
摘要:我们提出了一种根据单张图像预测房间布局的算法,它能够被推广到全景图、透视图、长方体布局和更一般化的布局中(如 L 形房间)。我们的方法可直接在全景图像上运行,而不是像近来的一些研究那样将全景图分解成多个透视图。我们的网络架构类似于 RoomNet,但是我们展示了一系列改进:根据消失点将图像对齐、预测多个布局元素(角落、边界、大小和图像转化),并且将一个带约束的曼哈顿布局和最终的预测结果进行了拟合。在全景图上,我们的方法在运算速度和预测准确度上有较好的性能;在透视图上,我们方法的预测准确度是最优方法之一,并且能够处理长方体形状布局和更一般的曼哈顿布局。

本文为机器之心编译,转载请联系本公众号获得授权。
✄------------------------------------------------
加入机器之心(全职记者/实习生):hr@jiqizhixin.com
投稿或寻求报道:editor@jiqizhixin.com
广告&商务合作:bd@jiqizhixin.com


