【泡泡一分钟】3D-SLAM的初始化技术:旋转估计及其在姿态图优化的应用的综述(ICRA-28)
每天一分钟,带你读遍机器人顶级会议文章
标题:Initialization Techniques for 3D SLAM: a Survey on Rotation Estimation and its Use in Pose Graph Optimization
作者:Luca Carlone, Roberto Tron, Kostas Daniilidis, and Frank Dellaert
来源:ICRA 2015
播音员:堃堃
编译:王慧国
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

今天为大家带来的文章是——3D-SLAM的初始化技术:旋转估计及其在姿态图优化的应用的综述,该文章发表于ICRA2015。
姿态图优化是基于姿态的同时定位与建图中的一个非凸优化问题。如果机器人的方向已知,那么姿态图优化将变成一个最小二乘问题,相应地,它的解也可以被有效且快速地计算出来。由于旋转使得SLAM是一个困难的问题,在这篇文章中,我们对3D旋转估计进行了综述。旋转估计在机器人学、计算机视觉和控制理论三个学科社区中有着很深远的研究历史。我们回顾这些领域的相关贡献,评估它们在SLAM领域中的实际应用,并评估它们在代表SLAM问题上的表现(如下图所示)。我们展示了使用旋转估计自举迭代姿态图解算器需要显着提高收敛速度和鲁棒性。
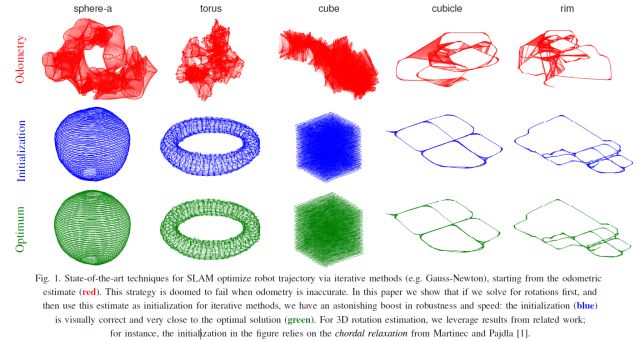
图中的第一行是里程计计算的轨迹,第二行是初始化的轨迹初始值,第三行是优化之后的结果。
Abstract
Pose graph optimization is the non-convex optimization problem underlying pose-based Simultaneous Localization and Mapping (SLAM). If robot orientations were known, pose graph optimization would be a linear least squares problem, whose solution can be computed efficiently and reliably. Since rotations are the actual reason why SLAM is a difficult problem, in this work we survey techniques for 3D rotation estimation. Rotation estimation has a rich history in three scientific communities: robotics, computer vision, and control theory. We review relevant contributions across these communities, assess their practical use in the SLAM domain, and benchmark their performance on representative SLAM problems (Fig. 1). We show that the use of rotation estimation to bootstrap iterative pose graph solvers entails significant boost in convergence speed and robustness.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





