视觉SLAM技术综述
点击“计算机视觉life”关注,置顶更快接收消息!
本文转载自“SIGAI人工智能平台”(ID:SIGAICN),主要介绍了视觉SLAM的概念、传统算法及深度学习的代表性开源算法。
什么是视觉SLAM
SLAM是“Simultaneous Localization And Mapping”的缩写,可译为同步定位与建图。概率 SLAM 问题 (the probabilistic SLAM problem) 起源于 1986 年的IEEE Robotics and Automation Conference 大会上,研究人员希望能将估计理论方法 (estimation-theoretic methods) 应用在构图和定位问题中。 SLAM最早被应用在机器人领域,其目标是在没有任何先验知识的情况下,根据传感器数据实时构建周围环境地图,同时根据这个地图推测自身的定位[1]。
假设机器人携带传感器 (相机) 在未知环境中运动,为方便起见,把一段连续时间的运动变成离散时刻 t=1,…k,而在这些时刻,用 x 表示机器人的自身位置,则各时刻的位置就记为 x1,x2…xk,它构成了机器人的轨迹。地图方面,假设地图由许多个路标组成,而每个时刻,传感器会测量到一部分路标点,得到它们的观测数据。设路标点共有 N 个,用 y1,y2…yn 表示。通过运动测量 u 和传感器读数 z 来求解定位问题 (估计 x)和建图问题 (估计 y)。

图 1 SLAM系统示意图[16]
只利用相机作为外部感知传感器的SLAM称为视觉SLAM (vSLAM [2])。相机具有视觉信息丰富、硬件成本低等优点,经典的vSLAM系统一般包含前端视觉里程计、 后端优化、 闭环检测和构图四个主要部分[3]。
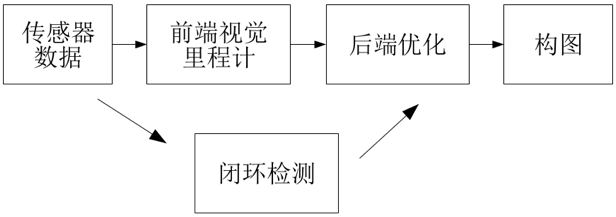
图 2 经典vSLAM系统流程图[5,16]
● 视觉里程计 (Visual Odometry):仅有视觉输入的姿态估计[4];
● 后端优化 (Optimization): 后端接受不同时刻视觉里程计测量的相机位姿,以及闭环检测的信息,对它们进行优化,得到全局一致的轨迹和地图[5];
● 闭环检测 (Loop Closing): 指机器人在地图构建过程中, 通过视觉等传感器信息检测是否发生了轨迹闭环, 即判断自身是否进入历史同一地点[6];
● 建图 (Mapping): 根据估计的轨迹,建立与任务要求对应的地图[5]。
根据生成方法的不同,SLAM可以分成两大类:间接方法和直接方法。下面依次介绍这两种方法。
间接法及其典型系统
间接法首先对测量数据进行预处理来产生中间层,通过稀疏的特征点提取和匹配来实现的,也可以采用稠密规则的光流,或者提取直线或曲线特征来实现。然后计算出地图点坐标或光流向量等几何量,因此间接法优化的是几何误差:

其中 ui 为 Ik-1 中任意像素点,它投影到空间点的坐标为 Pi, u′i是 Pi 投影到 Ik 上的坐标。之后利用中间层的数值来估计周围环境的三维模型和相机运动。
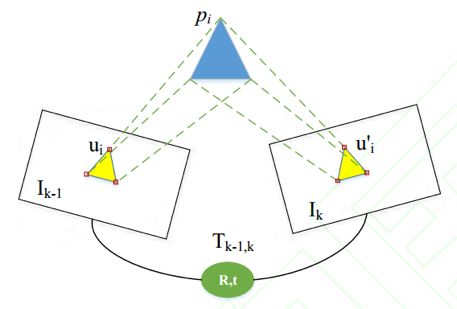
图 3 间接法示意图[3]
MonoSLAM
MonoSLAM 是第一个实时的单目视觉 SLAM 系统[7]。 MonoSLAM 以EKF(扩展卡尔曼滤波)为后端,追踪前端稀疏的特征点,以相机的当前状态和所有路标点为状态量,更新其均值和协方差。在 EKF 中,每个特征点的位置服从高斯分布,可以用一个椭球表示它的均值和不确定性,它们在某个方向上越长,说明在该方向上越不稳定。 该方法的缺点:场景窄、路标数有限、稀疏特征点易丢失等。

图 4 MonoSLAM效果图[7]
PTAM
PTAM[8]提出并实现了跟踪和建图的并行化,首次区分出前后端 (跟踪需要实时响应图像数据,地图优化放在后端进行),后续许多视觉SLAM 系统设计也采取了类似的方法。PTAM 是第一个使用非线性优化作为后端的方案,而不是滤波器的后端方案。提出了关键帧 (keyframes)机制,即不用精细处理每一幅图像,而是把几个关键图像串起来优化其轨迹和地图。该方法的缺点是:场景小、跟踪容易丢失。
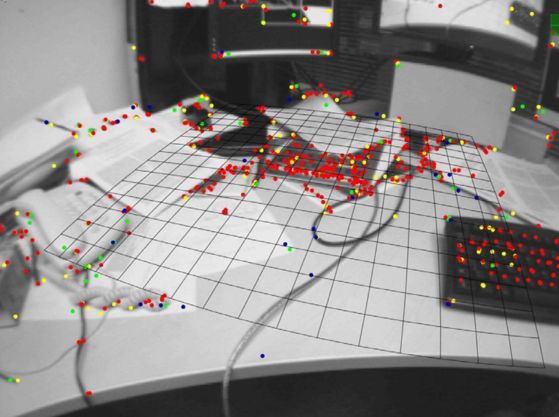
图 5 PTAM效果图(图片来源于文献[8])
ORB-SLAM (ORB_SLAM2)
ORB-SLAM[9]围绕ORB 特征计算,包括视觉里程计与回环检测的 ORB字典。ORB 特征计算效率比 SIFT 或 SURF 高,又具有良好的旋转和缩放不变性。ORB-SLAM 创新地使用了三个线程完成 SLAM,三个线程是:实时跟踪特征点的Tracking线程,局部 Bundle Adjustment 的优化线程和全局 Pose Graph 的回环检测与优化线程。该方法的缺点:每幅图像都计算一遍 ORB 特征非常耗时,三线程结构给 CPU带来了较重负担。稀疏特征点地图只能满足定位需求,无法提供导航、避障等功能。
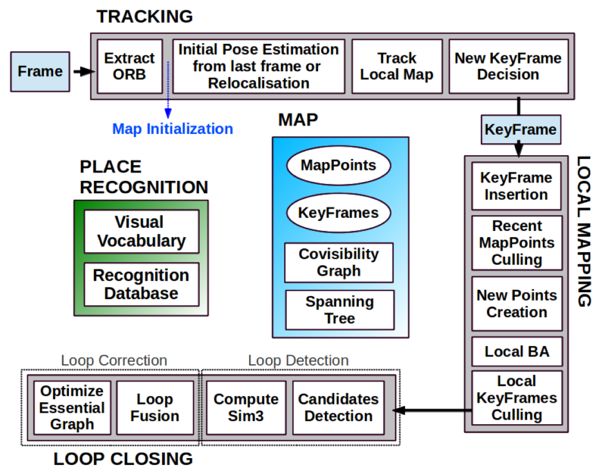
图 6 ORB-SLAM三线程流程图[9]
ORB-SLAM2[10]基于单目的 ORB-SLAM 做了如下贡献:第一个用于单目、双目和 RGB-D 的开源 SLAM 系统,包括闭环,重定位和地图重用; RGB-D 结果显示,通过使用 bundle adjustment,比基于迭代最近点(ICP) 或者光度和深度误差最小化的最先进方法获得更高的精度; 通过使用近距离和远距离的立体点和单目观察结果,立体效果比最先进的直接立体 SLAM 更准确; 轻量级的本地化模式,当建图不可用时,可以有效地重新使用地图。
直接法及其典型系统
直接法跳过预处理步骤直接使用实际传感器测量值,例如在特定时间内从某个方向接收的光,如下图所示。在被动视觉的情况下,由于相机提供光度测量,因此直接法优化的是光度误差:



图 7 直接法示意图[3]
DTAM
DTAM[11]是单目 VSLAM 系统, 是一种直接稠密的方法,通过最小化全局空间规范能量函数来计算关键帧构建稠密深度图,而相机的位姿则使用深度地图通过直接图像匹配来计算得到。对特征缺失、 图像模糊有很好的鲁棒性。该方法的缺点是:计算量非常大,需要 GPU 并行计算。 DTAM 假设光度恒定,对全局照明处理不够鲁棒。
LSD-SLAM
LSD-SLAM[12]建了一个大尺度直接单目 SLAM 的框架,提出了一种用来直接估计关键帧之间相似变换、尺度感知的图像匹配算法,在CPU上实现了半稠密场景的重建。该方法的缺点:对相机内参敏感和曝光敏感,相机快速运动时容易丢失,依然需要特征点进行回环检测。

图 8 LSD-SLAM流程图[12]
SVO
SVO[13](Semi-direct Visual Odoemtry) 是一种半直接法的视觉里程计,它是特征点和直接法的混合使用:跟踪了一些角点,然后像直接法那样,根据关键点周围信息估计相机运动及位置。由于不需要计算大量描述子,因此速度极快,在消费级笔记本电脑上可以达到每秒 300 帧,在无人机上可以达到每秒 55 帧。该方法的缺点是:舍弃了后端优化和回环检测,位姿估计存在累积误差,丢失后重定位困难。
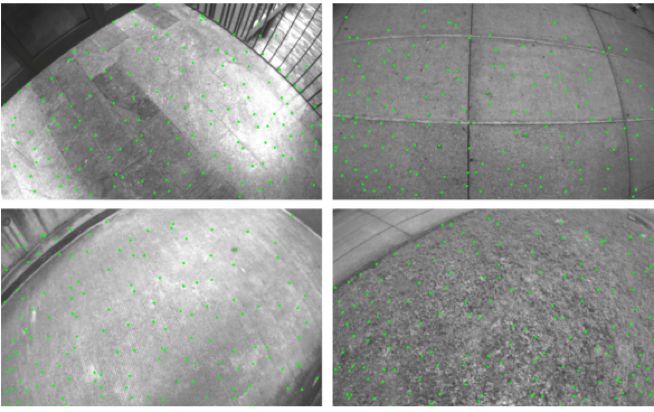
图 9 SVO效果示意图[13]
DSO
DSO[14](Direct Sparse Odometry) 是基于高度精确的稀疏直接结构和运动公式的视觉里程计的方法。不考虑几何先验信息,能够直接优化光度误差。并且考虑了光度标定模型,其优化范围不是所有帧,而是由最近帧及其前几帧形成的滑动窗口,并且保持这个窗口有 7 个关键帧。DSO 中除了完善直接法位姿估计的误差模型外,还加入了仿射亮度变换、 光度标定、 深度优化等。该方法没有回环检测。

图 10 DSO效果示意图[14]
基于深度学习的SLAM
传统的视觉SLAM在环境的适应性方面依然存在瓶颈,深度学习有望在这方面发挥较大的作用。目前,深度学习已经在语义地图、重定位、回环检测、特征点提取与匹配以及端到端的视觉里程计等问题上有了相关工作,下面列举一些典型成果:
●CNN-SLAM[17]在LSD-SLAM[12]基础上将深度估计以及图像匹配改为基于卷积神经网络的方法,并且可以融合语义信息,得到了较鲁棒的效果;
● 剑桥大学开发的PoseNet[18],是在GoogleNet[19]的基础上将6自由度位姿作为回归问题进行的网络改进,可以利用单张图片得到对应的相机位姿;
● 《视觉SLAM十四讲》[5]一书的作者高翔,利用深度神经网络而不是常见的视觉特征来学习原始数据的特征,实现了基于深度网络的回环检测[20];
● LIFT[21]利用深度神经网络学习图像中的特征点,相比于SIFT[22]匹配度更高,其流程图如下图所示:
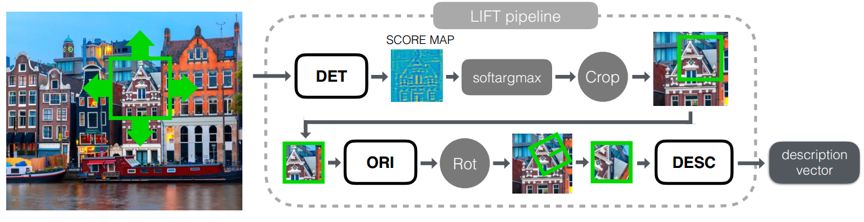
图 11 LIFT流程图[21]
LIFT(Learned Invariant Feature Transform)由三个部分组成:Detector,Orientation Estimator和Descriptor。每一个部分都基于CNN实现,作者用Spatial Transformers将它们联系起来,并用soft argmax函数替代了传统的非局部最大值抑制,保证了端到端的可微性。

图 12 四分支孪生训练网络架构[21]
孪生训练架构(Siamese Network)包含四个分支,其中P1和P2对应同一个点的不同视角,作为训练Descriptor的正样本,P3代表不同的3D点,作为Descriptor的负样本;P4不包含特征点,仅作为训练Detector的负样本。由大P,Detector,softargmax和Spatial Transformer layer Crop共同得到的小p反馈到Orientation Estimator,Orientation Estimator和Spatial Transformer layer Rot提供pθ 给Descriptor,得到最终的描述向量d。作者给出了LIFT与SIFT特征匹配的效果对比。

图 13 LIFT与SIFT特征匹配对比[21]
特征匹配对比图中左列为SIFT匹配结果,右列为LIFT。绿色线条代表正确匹配,红色圆圈代表描述子区域,可以看到,LIFT得到了比SIFT更稠密的匹配效果。
UnDeepVO[23]能够通过使用深度神经网络估计单目相机的6自由度位姿及其视野内的深度,整体系统框架概图见下图。
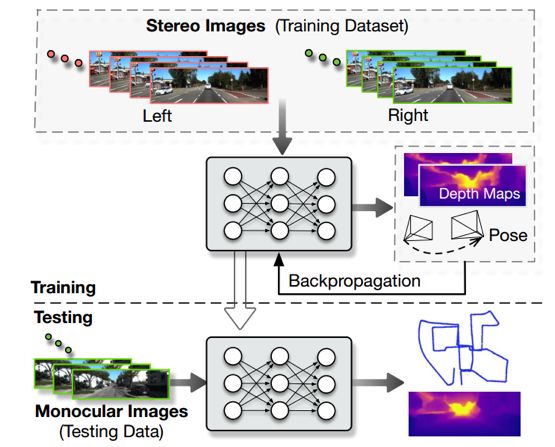
图 14 UnDeepVO系统框架概图[23]
UnDeepVO有两个显著的特点:一个是采用了无监督深度学习机制,另一个是能够恢复绝对尺度。UnDeepVO在训练过程中使用双目图像恢复尺度,但是在测试过程中只使用连续的单目图像。该文的主要贡献包括以下几点:
1.通过空间和时间几何约束,用无监督的方式恢复了单目视觉里程计的绝对尺度;
2.利用训练过程中的双目图像对,不仅估计了姿态还估计了稠密的带有绝对尺度的深度图;
3.在KITTI数据集上评价了该系统, UnDeepVO对于单目相机有良好的位姿估计结果。
UnDeepVO由位姿估计和深度估计构成,两个估计系统均把单目连续图像作为输入,分别以带有尺度的6自由度位姿和深度作为输出。对于位姿估计器,它是基于VGG的 CNN架构。 它把两个连续的单目图像作为输入,并预测它们之间的6自由度变换。 由于旋转(由欧拉角表示)具有高非线性,因此与平移相比通常难以训练。 在有监督训练中,一种常用的方法是将旋转损失作为一种归一化方式给予更大的权重。 为了使用无监督学习更好地训练旋转,作者在最后一个卷积层之后用两组独立的全连接层解耦平移和旋转。 这使得作者能够引入一个权重来标准化旋转和平移的预测,以获得更好的性能。对于深度估计器,它基于encoder-decoder结构来生成稠密的深度图。 与其他深度估计方法不同的是,该方法从网络中产生视差图像(深度的倒数),UnDeepVO的深度估计器可以直接预测深度图,以这种方式训练整个系统更容易收敛。系统结构图如下图所示。
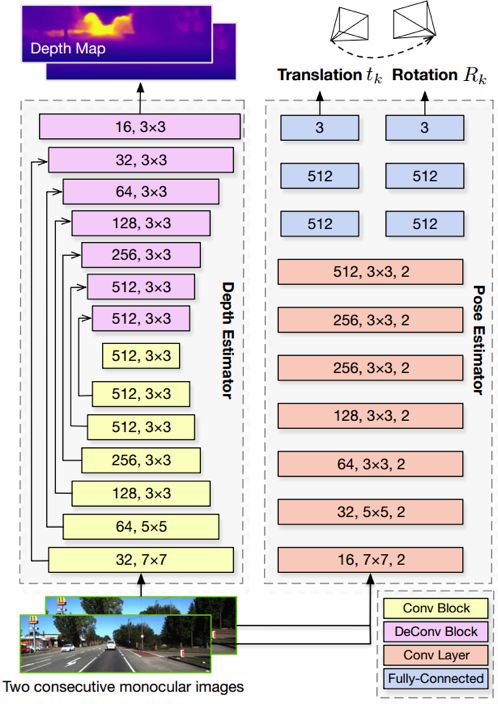
图 15 网络结构图[23]
总结
本文介绍了基于传统算法和深度学习的代表性SLAM方法。当前的 SLAM 算法在复杂的机器人运动和环境中很容易失效 (例如:机器人的快速运动, 高度动态性的环境),通常不能面对严格的性能要求,例如,用于快速闭环控制的高速率估计。大多数的SLAM没有自由主动地收集数据,行动方案不够高效,并且,目前 vSLAM 方案中所采用的图像特征的语义级别太低,造成特征的可区别性太弱[15]。因此,今后的视觉SLAM将向着主动SLAM、语义SLAM以及与其它传感器(例如IMU)融合的方向发展。
参考文献
[1] Durrant-Whyte, H, and Bailey, Tim. ”Simultaneous Localization and Mapping: Part I.” IEEE Robotics & Amp Amp Automation Magazine 13.2(2006):99 - 110.
[2] Fuentes-Pacheco, Jorge, J. Ruiz-Ascencio, and J. M. Rendón-Mancha. ”Visual simultaneous localization and mapping: a survey.” Artifcial Intelligence Review 43.1(2015):55-81.
[3] 陈常, 朱华, 由韶泽. 基于视觉的同时定位与地图构建的研究进展 [J/OL]. 计算机应用研究,2018,(03):1-9(2017-08-18).
[4] Nister, D, O. Naroditsky, and J. Bergen. ”Visual odometry.” Computer Vision and Pattern Recognition, 2004. CVPR 2004. Proceedings of the 2004 IEEE Computer Society Conference on IEEE, 2004:I-652-I-659 Vol.1.
[5] 高翔. 视觉 SLAM 十四讲 [M]. 北京: 电子工业出版社, 2017.
[6] 赵洋等. ” 基于深度学习的视觉 SLAM 综述.” 机器人 39.6(2017):889-896.
[7] Davison, Andrew J., et al. ”MonoSLAM: Real-time single camera SLAM.” IEEE transactions on pattern analysis and machine intelligence 29.6 (2007): 1052-1067.
[8] Klein, Georg, and David Murray. ”Parallel tracking and mapping for small AR workspaces.” Mixed and Augmented Reality, 2007. ISMAR 2007. 6th IEEE and ACM International Symposium on. IEEE, 2007.
[9] Mur-Artal, Raúl, J. M. M. Montiel, and J. D. Tardós. ”ORB-SLAM: A Versatile and Accurate Monocular SLAM System.” IEEE Transactions on Robotics 31.5(2015):1147-1163.
[10] Mur-Artal, Raul, and Juan D. Tardós. ”Orb-slam2: An open-source slam system for monocular, stereo, and rgb-d cameras.” IEEE Transactions on Robotics 33.5 (2017): 1255-1262.
[11] Newcombe, Richard A, S. J. Lovegrove, and A. J. Davison. ”DTAM: Dense tracking and mapping in real-time.” International Conference on Computer Vision IEEE Computer Society, 2011:2320-2327.
[12] Engel, Jakob, T. Schöps, and D. Cremers. ”LSD-SLAM: Large-Scale Direct Monocular SLAM.” 8690(2014):834-849.
[13] Forster, Christian, M. Pizzoli, and D. Scaramuzza. ”SVO: Fast semi-direct monocular visual odometry.” IEEE International Conference on Robotics and Automation IEEE, 2014:15-22.
[14] Engel, Jakob, V. Koltun, and D. Cremers. ”Direct Sparse Odometry.” IEEE Transactions on Pattern Analysis & Machine Intelligence PP.99(2016):1-1.
[15] Cadena, Cesar, et al. ”Past, Present, and Future of Simultaneous Localization and Mapping:Toward the Robust-Perception Age.” IEEE Transactions on Robotics 32.6(2016):1309-1332.
[16] 吕霖华. 基于视觉的即时定位与地图重建(V-SLAM)综述[J]. 中国战略新兴产业, 2017(4).
[17] Tateno K, Tombari F, Laina I, et al. CNN-SLAM: Real-time dense monocular SLAM with learned depth prediction[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR). 2017, 2.
[18] Kendall A, Grimes M, Cipolla R. Posenet: A convolutional network for real-time 6-dof camera relocalization[C]//Proceedings of the IEEE international conference on computer vision. 2015: 2938-2946.
[19] Szegedy C, Liu W, Jia Y, et al. Going deeper with convolutions[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2015: 1-9.
[20] Gao X, Zhang T. Loop closure detection for visual slam systems using deep neural networks[C]//Control Conference (CCC), 2015 34th Chinese. IEEE, 2015: 5851-5856.
[21] Yi K M, Trulls E, Lepetit V, et al. Lift: Learned invariant feature transform[C]//European Conference on Computer Vision. Springer, Cham, 2016: 467-483.
[22] Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International journal of computer vision, 2004, 60(2): 91-110.
[23] Li R, Wang S, Long Z, et al. Undeepvo: Monocular visual odometry through unsupervised deep learning[C]//2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2018: 7286-7291.

推荐阅读
从零开始一起学习SLAM | 为什么要学SLAM?
从零开始一起学习SLAM | 学习SLAM到底需要学什么?
从零开始一起学习SLAM | SLAM有什么用?
从零开始一起学习SLAM | C++新特性要不要学?
从零开始一起学习SLAM | 为什么要用齐次坐标?
从零开始一起学习SLAM | 三维空间刚体的旋转
从零开始一起学习SLAM | 为啥需要李群与李代数?
从零开始一起学习SLAM | 相机成像模型
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 神奇的单应矩阵
从零开始一起学习SLAM | 你好,点云
从零开始一起学习SLAM | 给点云加个滤网
从零开始一起学习SLAM | 点云平滑法线估计
零基础小白,如何入门计算机视觉?
SLAM领域牛人、牛实验室、牛研究成果梳理
我用MATLAB撸了一个2D LiDAR SLAM
可视化理解四元数,愿你不再掉头发






