如何从GPS定位还原公主坟高架桥地图?


图1. 使用GPS轨迹生成地图的示例。
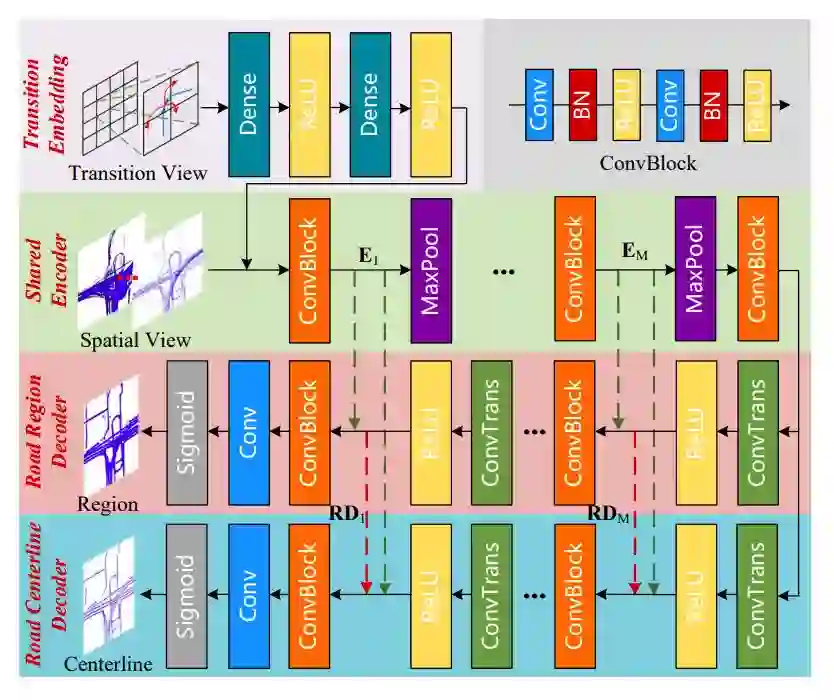
一、框架
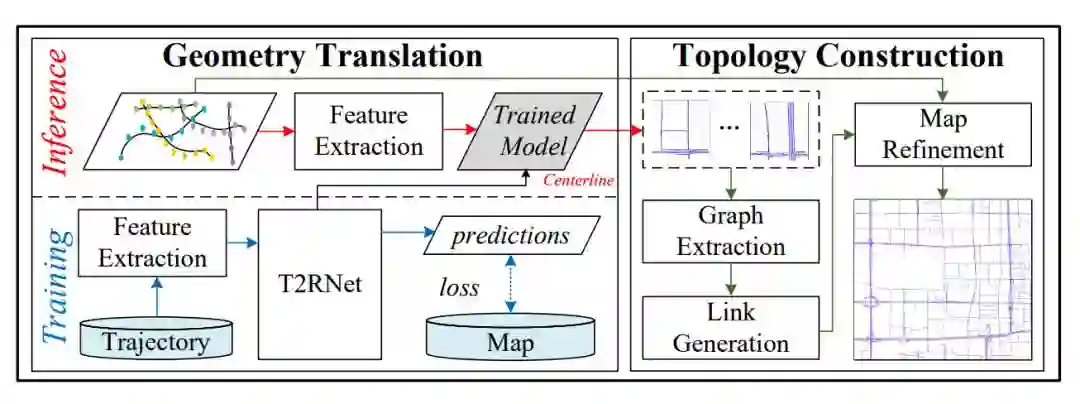
图2. DeepMG框架示意图。

二、实验
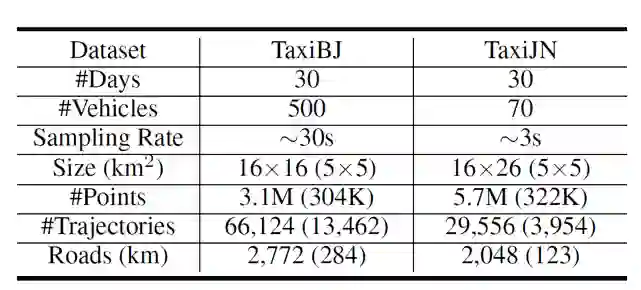
表1. 数据描述。
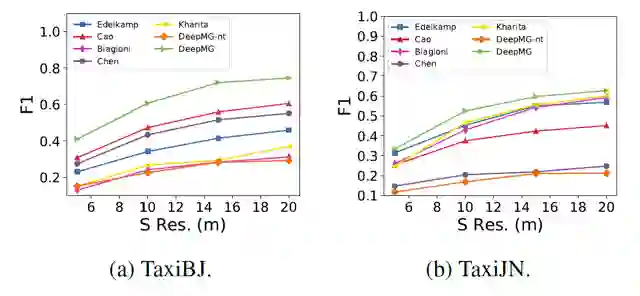
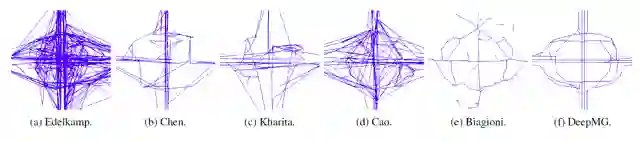
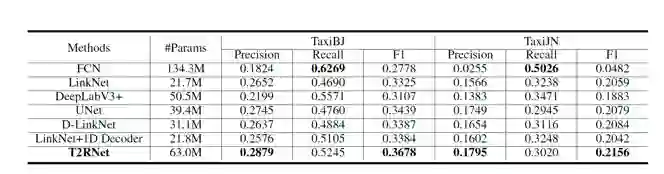
表2. 不同数据集上的模型比较。
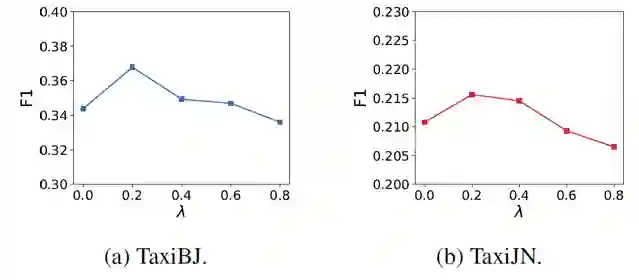
图7. 的影响评估。
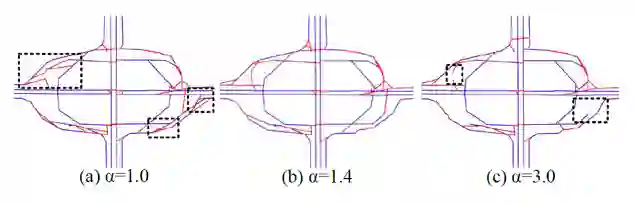
图8. 的影响。
三、结论
登录查看更多
相关内容

Arxiv
10+阅读 · 2018年1月29日


相关VIP内容
相关资讯
相关论文
Arxiv
10+阅读 · 2018年1月29日