DeepMind盈利后开始「买买买」!收购机器人模拟平台MuJoCo,全面开源

新智元报道
新智元报道
来源:DeepMind
编辑:David、霜叶
【新智元导读】DeepMind史上首次实现盈利之后,开始「买买买」了!刚刚,DeepMind宣布收购机器人模拟器平台MuJoCo,准备将其作为全面开源平台,免费提供给研究人员使用。
有钱了,就要买买买!这回说的是DeepMind。
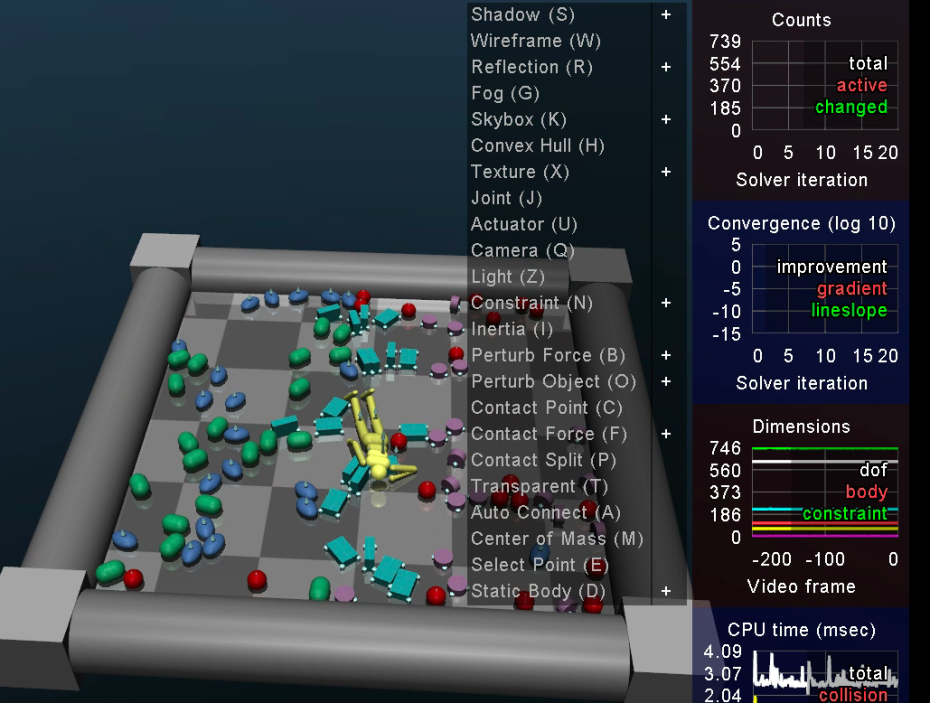
MuJoCo:C语言开发,模拟真实运动

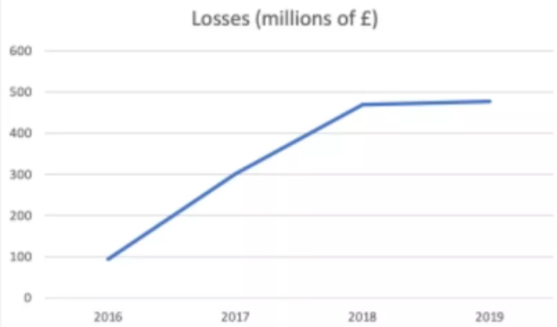
多年盈利后首次「买买买」


登录查看更多
相关内容
Arxiv
0+阅读 · 2022年4月20日



相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月20日