无人驾驶开源仿真平台整理

盘点几款在无人驾驶研究中可以使用的开源模拟平台,包括Carla、AirSim、Udacity self-driving car simulator、Apollo、Autoware。
个人研究无人驾驶的门槛确实挺高,一方面是由于无人驾驶是涉及到车辆定位,物体检测、跟踪,路径规划等一系列复杂的课题,另一方面是由于没有自动驾驶实验室和实验基地的支撑,研究的算法无法验证和落到实处。
无人驾驶汽车在真实上路后所面临的外部环境十分复杂且多变,我们可以通过仿真的形式训练和验证无人驾驶汽车在不同场景下的感知和决策算法。
下面将介绍几款开源的自动驾驶仿真平台项目,包括Carla、AirSim、Udacity self-driving car simulator、Apollo和Autoware,项目在Github上都有详细的代码和文档。
需要注意的是,从技术上讲,这些平台主要分为两类:
第一类是基于合成的数据,对环境、感知及车辆进行模拟,这里的感知大多数是图像层面的感知,这类模拟器主要用于感知、规划算法的初步开发上,Carla、AirSim、Udacity self-driving car simulator就属于这类;
第二类是基于真实数据的回放,这里的真实数据包括图像、lidar、radar等各种传感器的数据,这类模拟器主要用于测试无人驾驶中信息融合算法以及车辆不同部件的性能,Apollo和Autoware就属于这类。
一、Carla

介绍
英特尔实验室联合丰田研究院和巴塞罗那计算机视觉中心联合发布 CALRA,用于城市自动驾驶系统的开发、训练和验证的开源模拟器,支持多种传感模式和环境条件的灵活配置,论文中详细评估并比较了三种自动驾驶方法的性能。
论文摘要翻译作为介绍:
本文介绍一款用于自动驾驶研究的开源模拟器:CARLA。CARLA 的开发包括从最基础的直到支持城市自动驾驶系统的开发、训练和验证。除了开源代码和协议,CARLA 还提供了为自动驾驶创建的开源数字资源(包括城市布局、建筑以及车辆),这些资源都是可以免费获取和使用的。这个模拟平台能够支持传感套件和环境条件的灵活配置。我们使用 CARLA 来研究三种自动驾驶方法的性能:传统的模块化流水线,通过模仿学习训练得到的端到端模型,通过强化学习训练得到的端到端模型。这三种方法在难度递增的受控环境中做了评估,并用 CARLA 提供的指标进行性能测试,表明 CARLA 可以用来进行自动驾驶的研究。
机器之心英特尔&丰田联合开源城市驾驶模拟器CARLA
个人体验
安装非常方便,但是个人笔记本太破,跑不动。值得一提的是Carla提供不同天气下的环境,同时在感知层面提供三种模式的图像:正常的摄像头图像、深度图和语义分割图。
项目概况
项目地址:CARLA Simulator
在线文档:CARLA Documentation
介绍视频:YouTube:CARLA: An Open Urban Driving Simulator
论文地址:CARLA: An Open Urban Driving Simulator 或 点击下载PDF
二、AirSim

介绍
AirSim 是微软开源的一个跨平台的建立在虚幻引擎( Unreal Engine)上的无人机以及其它自主移动设备的模拟器。 它支持硬件在循环与流行的飞行控制器的物理和视觉逼真模拟。它被开发为一个虚幻的插件,可以简单地放到任何你想要的虚幻环境中。
该模拟器创造了一个高还原的逼真虚拟环境,模拟了阴影、反射等其它现实世界中容易干扰的环境,让无人机不用经历真实世界的风险就能进行训练。
AirSim 的目标是作为AI研究的平台,以测试深度学习、计算机视觉和自主车辆的增强学习算法。为此, AirSim 还公开了 API,以平台独立的方式检索数据和控制车辆。
项目概况
项目地址:Welcome to AirSim
相关教程:Tutorials
介绍视频:YouTube:Cars in AirSim
论文地址:AirSim: High-Fidelity Visual and Physical Simulation for Autonomous Vehicles
三、Udacity self-driving-car-sim

介绍
Udacity通过开源协议授权公开了它的自动驾驶汽车模拟器,有 Unity 技术背景的任何人都可以利用此模拟器的资源,载入软件内置场景或创建自己的虚拟测试路线。
这个模拟器用于Udacity的无人驾驶工程师纳米学位课程,主要用于教授学生如何使用深度学习,训练无人驾驶汽车。
个人体验
第一:挺有趣的,两个地图只完成了简单的那个地图,难度大的那张地图还有挑战。
第二:这个项目的算法架构就是依据NVIDIA的那篇端到端学习的论文,利用卷积神经网络训练,项目教授了一些工程上的技巧,挑战在于优化神经网络。
第三:这个平台算是这些个开源平台中最简单的,我笔记本唯一跑的动就是这个了。
个人作品,运行较慢,可以快进:
项目概况
项目地址:Welcome to Udacity’s Self-Driving Car Simulator
课程项目:行为克隆:Behaviorial Cloning Project
相关教程:Unity Simulator User Instructions
网上作品:YouTube:Behavioral Cloning - neural network clones human driving
参考论文:End to End Learning for Self-Driving Cars
四、Apollo
介绍
Apollo不多说,国内宣传的很火了已经。
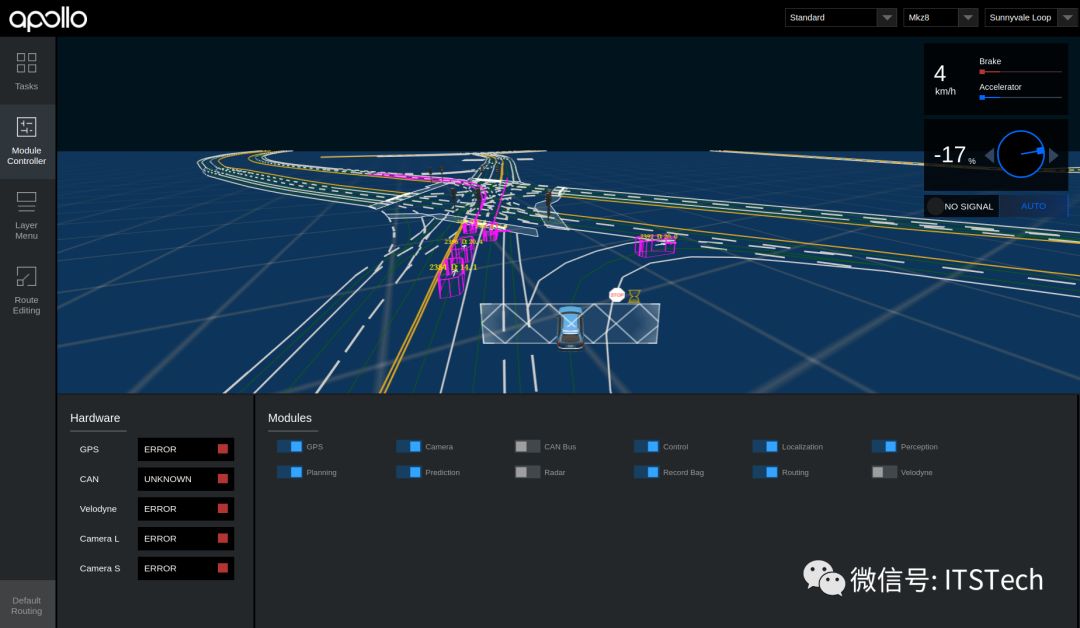
Apollo是百度公布的开源自动驾驶平台,是支持完全自动驾驶功能的高性能灵活架构。
项目概况
项目地址:Apollo
在线文档:Documents
试乘视频:YouTube:CES 2018 百度Apollo 2.0无人车美国桑尼维尔试乘
Apollo 2.0:apollo-v2.0.0
五、Autoware
介绍
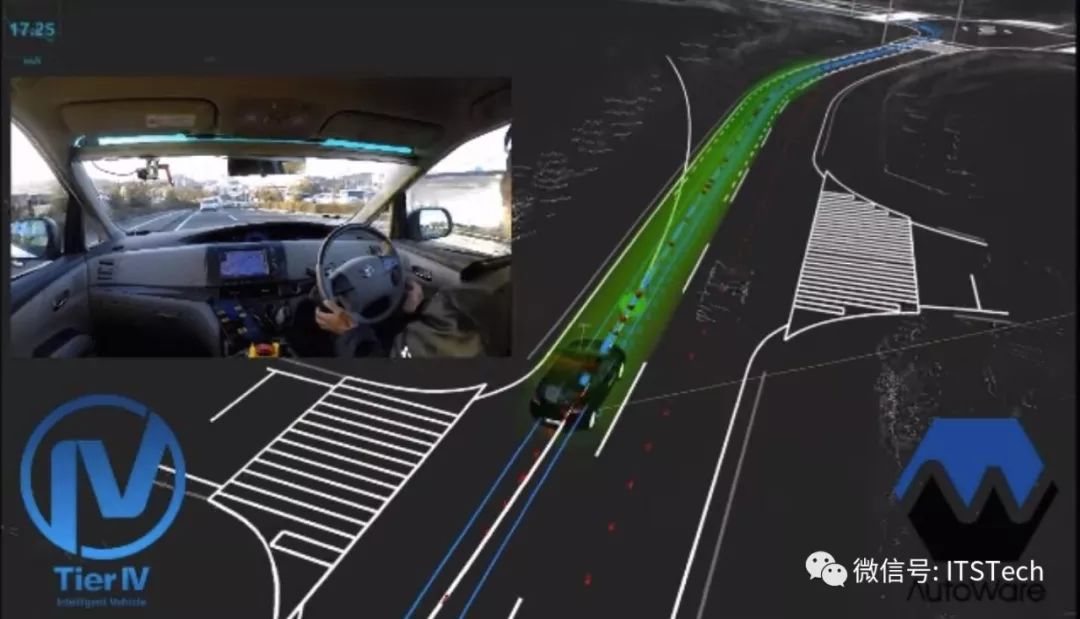
Autoware是用于城市自主驾驶的开源平台,界面很有科技感,功能也很强大,支持以下功能:
3D本地化
3D映射
路径规划
路径跟随
加速/制动/转向控制
数据记录
汽车/行人/物体检测
交通信号检测
交通灯识别
车道检测
对象跟踪
传感器校准
传感器融合
面向云的地图
连接自动化
智能手机导航
软件仿真
虚拟现实
项目概况
项目地址:Autoware
在线文档:Autoware-Manuals
视频教程:Instruction Videos
路测Demo:Tier IV self-driving on urban public roads (as of Feb 2017)
论文地址:An Open Approach to Autonomous Vehicles




