【泡泡一分钟】基于提取自训练与非线性系统的分析线性模型的最优反馈控制
每天一分钟,带你读遍机器人顶级会议文章
标题:Optimal Feedback Control based on Analytical Linear Models extracted from Neural Networks trained for Nonlinear Systems
作者:Yu Duan, Shuhei Ikemoto, and Koh Hosoda
来源:2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
编译:明煜航
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

很多的研究都关注于如软骨骼系统的软体机器人的发展和控制。迄今,虽然这些机器人的控制器极其简单,但是他们已经展现出了对于环境很强的适应能力。然而,因为这些机器人很难用数据模型来表述, 所以现在任然没有一个系统的设计策略来设计简单控制器,只能用控制理论来处理传统机器人问题。
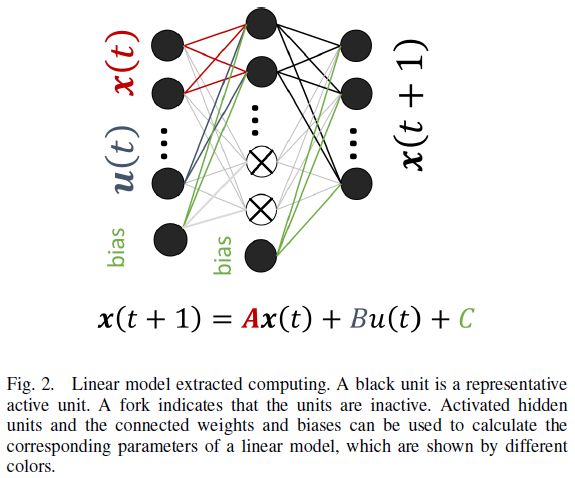
为了处理这个问题,作者提出了一种使用神经网络的全新方法来获得数学模型。特别是,在使用这种方法时,控制理论被运用到从训练好神经网络中提取出的线性系统模型上,来表达机器人的前进动态。通过模拟,作者验证了所提方法的有效性及优势。

Abstract
A number of researches have been focusing on the development and control of robots with soft structures such as flexible musculoskeletal systems. Thus far, it has been reported that these robots can achieve high adaptability to environments despite their extremely simple controllers. However, because these robots are difficult to model mathematically, there is still no systematic design policy, in which control theory has been playing a role in conventional robotics, for constituting simple controllers. To tackle this problem, we propose a new approach using a neural network to obtain mathematical models. In particular, with this method, the control theory is applied to linear system models extracted from a network trained to express the forward dynamics of a robot. Through simulations, the validity and advantage of the proposed method was successfully confirmed.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




