【泡泡点云时空】PU-Net:点云上采样网络(CVPR2018-6)
泡泡点云时空,带你精读点云领域顶级会议文章
标题:PU-Net: Point Cloud Upsampling Network
作者: Lequan Yu Xianzhi Li Chi-Wing Fu Daniel Cohen-Or Pheng-Ann Heng
来源:CVPR2018
编译:李炫毅
审核:李敏乐
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

由于点云数据的稀疏性和不规则性,所以用深度神经网络学习和分析3D点云一直以来是一个具有挑战性的工作。这篇文章中我们提出了一种数据驱动的点云上采样技术。核心思想是学习每个点的多层次特征,然后利用不同的卷积分支在特征空间的中进行扩充。然后将扩充后的特征进行分解并重建为上采样点云集。我们的网络应用于块状点云上,并且使用了联合的损失函数使得上采样后的点在潜在的曲面上分布一致。我们的方法在合成与真实的扫描数据上进行了大量的实验并且证明了它是一种比部分基础模型更加有效的基于优化的方法。实验结果显示,我们的上采样点云具有更好的一致性分布并且和潜在的曲面更加贴合。
流程
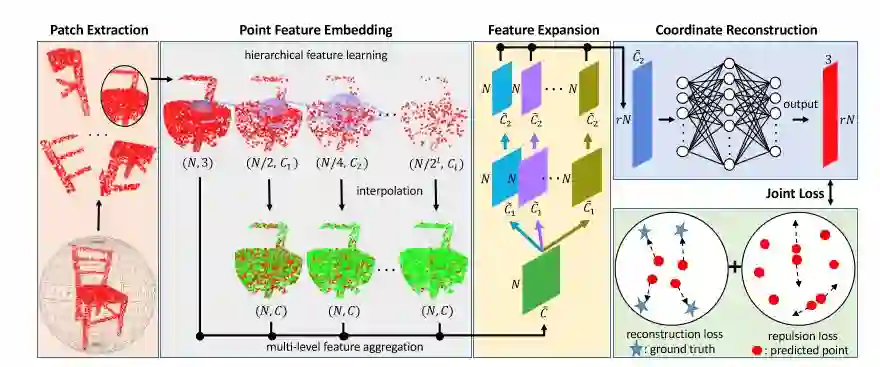
图一是上采样网络的结构图(最好从颜色上观察):N个点输入网络,相应的有rN个点输出网络,这里r是上采样率。 C表示特征通道数目。我们用插值恢复N个点不同特征层次特征然后利用卷积网络将不同层次的特征变为C. 点云特征集成模块中红色显示原来的和逐步降采样的点,绿色显示恢复的特征。我们联合使用重建损失函数和互斥损失函数用来端到端地训练上采样网络。

Abstract
Learning and analyzing 3D point clouds with deep networks is challenging due to the sparseness and irregularity of the data. In this paper, we present a data-driven point cloud upsampling technique. The key idea is to learn multilevel features per point and expand the point set via a multibranch convolution unit implicitly in feature space. The expanded feature is then split to a multitude of features, which are then reconstructed to an upsampled point set. Our network is applied at a patch-level, with a joint loss function that encourages the upsampled points to remain on the underlying surface with a uniform distribution. We conduct various experiments using synthesis and scan data to evaluate our method and demonstrate its superiority over some baseline methods and an optimization-based method. Results show that our upsampled points have better uniformity and are located closer to the underlying surfaces.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以点击阅读原文获得链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com





