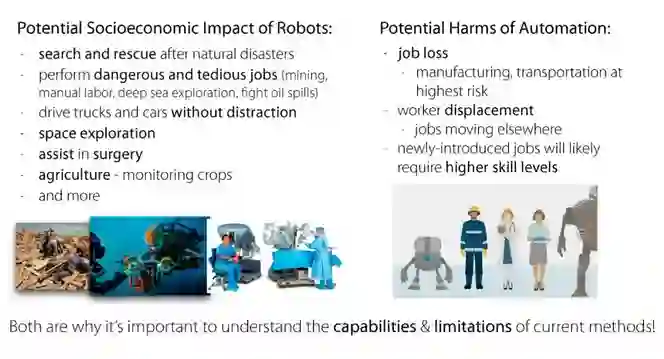
机器人在社会上有很多应用,比如今年双十一我们明显感到快递变得更快了!这背后就有分拣机器人的功劳~ 除此之外,机器人在搜救,太空探索,手术等很多方面都有应用。而为了让机器人能够更好地服务于人类,让机器模仿人的行为,并变得更加智能必不可少。
来自斯坦福与Google Research的Chelsea Finn为我们介绍了面向机器人的机器学习。
《Machine Learning for Robots》教程的内容
-
基本知识与模仿学习:物体分类是一个监督学习的任务,处理的是独立同分布的数据,因此能够取得较好的结果。但是物体生产是一个序列决策任务,决策会影响到下一步的状态。模仿学习又称“行为克隆”,它很简单,但是需要人类的监督信息,并且天花板就是人类。并且,由于它的错误是累积的,可能每一步差之毫厘,最终结果就会失之千里。
-
基于模型的强化学习:基于模型的强化学习有几种实现方式。1. 随机采样,动态训练,优点是简单,但是缺点也很明显,会遇到分布不匹配的问题。2. 迭代地采样,逐步优化模型。优点是解决了分布不匹配的问题。3. 使用MPC迭代的采样,优点是对小的模型的错误鲁棒,缺点是计算复杂。
-
输入为图片的基于模型的强化学习:如果反馈信号为高维数据(如图片)时,基于模型的强化学习主要有两种方案:在隐空间学习,即学习反馈信号的表示,然后在隐空间做基于模型的强化学习(基于概率的方法、结构化方法(空间或者以物体为中心的结构化表示));直接在观察空间学习:使用深度学习,预测可能得到的反馈信号(视频),再与实际的反馈信号相比,最小化。
-
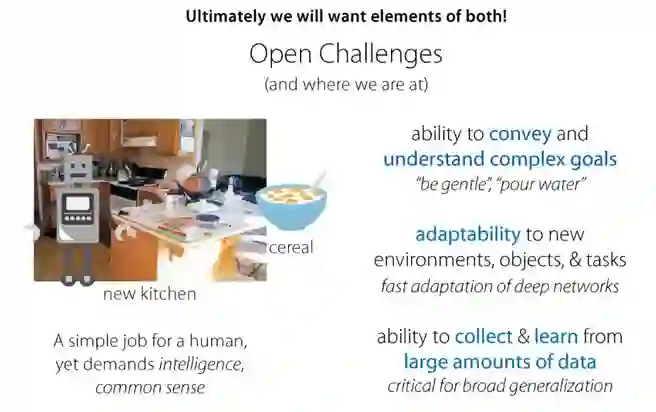
机器人学习的一些挑战:理解和转化一些复杂的命令;新环境的适应性;收集大量数据并从中学习。
PPT下载链接:https://pan.baidu.com/s/1-zqrWBUrXCVMrj0d3EPTkQ 提取码:4jta