麻省理工新型“人造肌肉”材料,未来或可驱动微型飞行器用于救援搜索
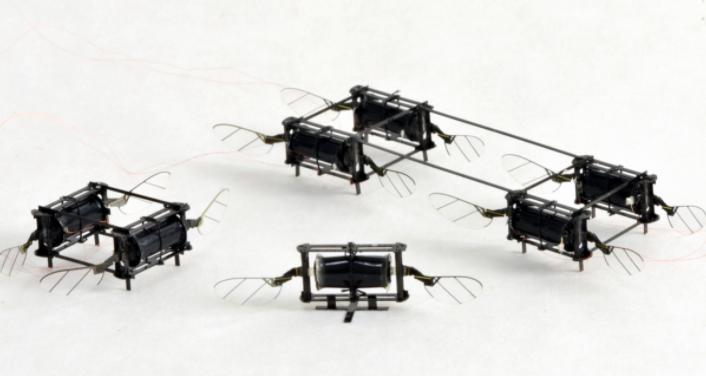

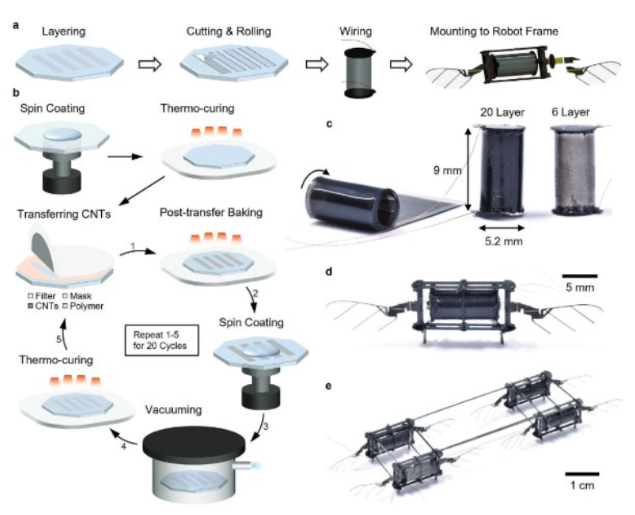
该项研究的突破,可以归功于研发团队进一步降低了 DEA 每一层弹性聚合物(Elastomer) 的厚度。
研究人员表示,从材料角度出发,降低电压就是要在减小每层弹性聚合物厚度的同时,增加相应的层数。
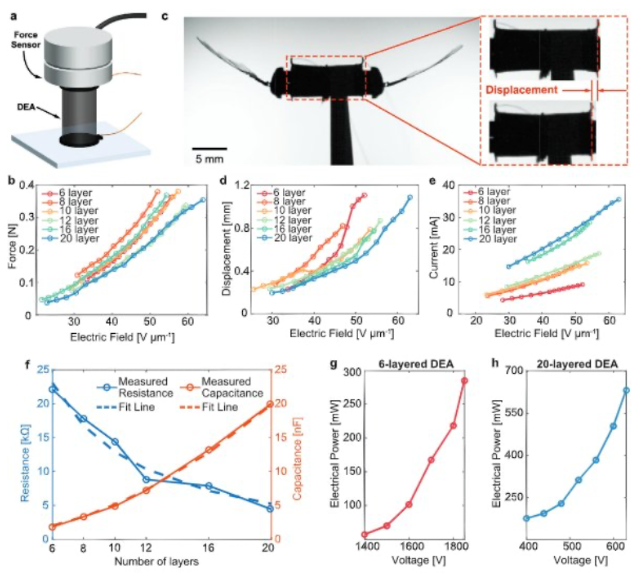
随后,他们还进行了各种对比测试,如静态扇翅测试、动态升力测试和最后的飞行器起飞测试等。通过这些测试,研究人员获得了完整的数据,证明其最新加工工艺的确提高了 DEA 和微型飞行器的整体性能。


登录查看更多
相关内容

Arxiv
0+阅读 · 2022年4月15日
Arxiv
19+阅读 · 2021年10月28日





相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月15日
Arxiv
19+阅读 · 2021年10月28日